Summary
A Survey on Vision-Language-Action Models: An Action Tokenization Perspective
- 核心: 把所有 VLA 模型抽象为同一框架——vision/language 输入经过一串 VLA modules,逐步产生越来越 grounded 的 action tokens,最终落到可执行动作;论文的主要区分变成 “用了哪种 action token”。
- 方法: 把 action tokens 按具体形式归成 8 类(language description / code / affordance / trajectory / goal state / latent / raw action / reasoning),对每一类综述其代表工作、优缺点、未来方向;再谈 data pyramid 和从 IL→RL、VLA model→VLA agent 的范式演进。
- 结果: 提出 “未来 VLA 不会是单一 token 主导,而是 hierarchical 组合”——顶层 language plan + code 做长时 planning 和 logic control,中间层 affordance/trajectory/goal video 提供精细运动表征,底层学习 subtask→raw action 的 end-to-end policy;reasoning 作为 meta-token 贯穿各层。
- Sources: paper | github
- Rating: 2 - Frontier(对 VLA 领域 landscape 梳理系统且提出有辨识度的 tokenization framework,但 influential_citations=3/65 且 github 已 stale,未见其他工作以本文的 taxonomy 作为 reference frame,分类框架是否会成为社区共识仍待观察)
Key Takeaways:
- 统一框架:VLA 模型可以被 re-cast 为 “vision+language → 一串 VLA module 产生的 action tokens chain → executable action”,其中 “action token” = VLA module 的可微/功能性输出 + 语义上有意义的中间表示。这与 LLM 里 “language token” 的地位 analogous。
- Action Token 八分类:language description、code、affordance、trajectory、goal state、latent representation、raw action、reasoning,每类是本文 Section 4–11 的一章。
- 不会有单一 winner:不同 token 互补,语言适合 long-horizon planning、affordance/trajectory/goal video 适合中间表征、raw action 适合 scale-up 的 end-to-end 学习;建议 hierarchical 组合。
- Reasoning 是 meta-token:作者认为未来的 reasoning 不应该只在 language space 做,而应该直接在 action token space 做 chain-of-thought(“人不是只靠语言规划,也靠物理想象”);加上 adaptive test-time compute。
- Data Pyramid:bottom = web/human video、middle = synthetic/simulation、top = real robot(最稀缺但最 embodiment-aligned);这三层共同支撑 token 学习的 scalability。
- 未走完的路:from IL to RL(real-world reset 成本 + VLM auto reward),from gripper to dexterous hand + 多模态(触觉/听觉),from capability-centric 到 safety-aware。
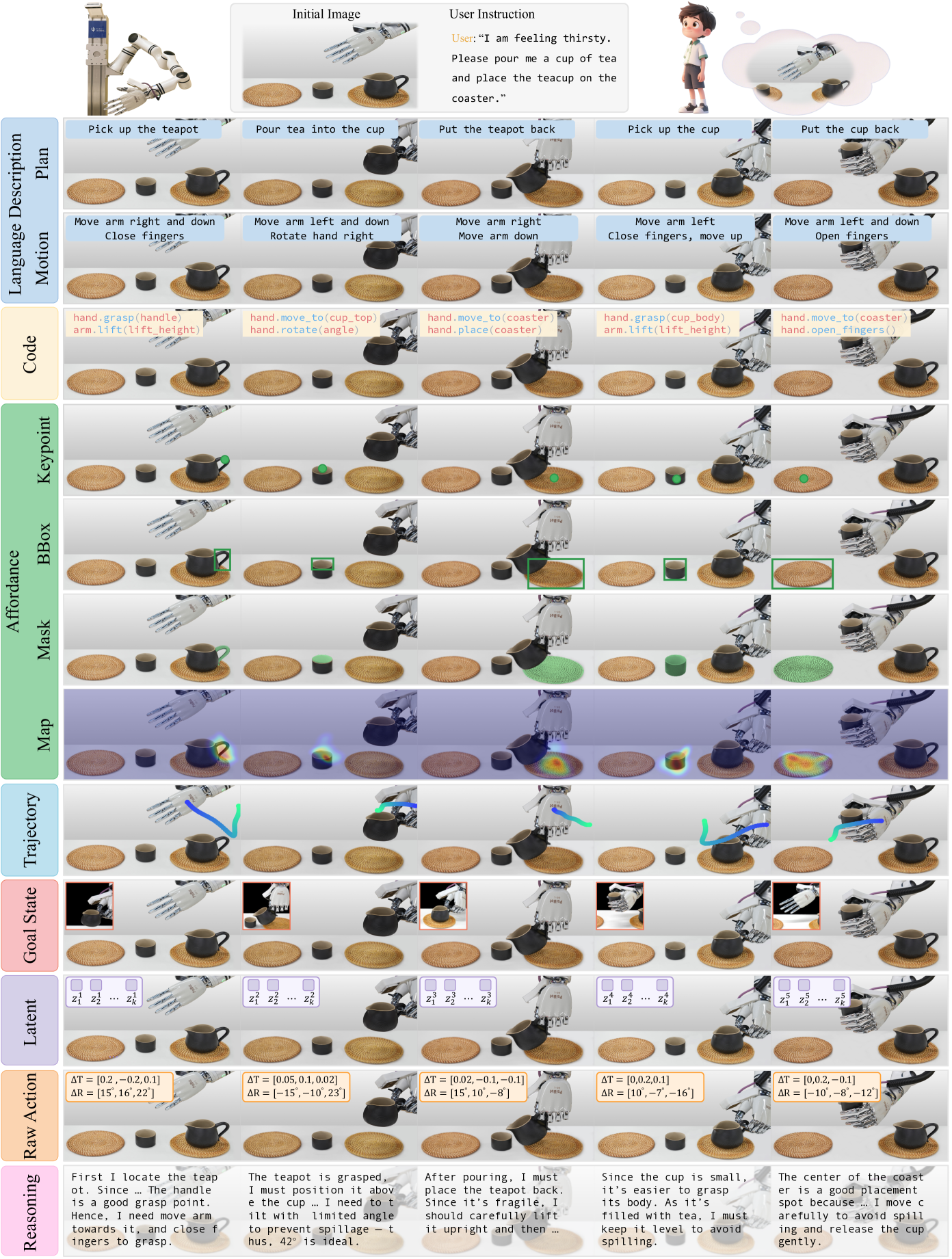
Teaser. 同一任务、八种 action token。 给定同一个 language instruction 和 visual scene,不同 VLA 方案会生成形态各异的 action token——从 “pick up the cup”(language plan)到一段 Python(code)、一个 heatmap(affordance)、一组 waypoints(trajectory)、一张未来图(goal state)、一列 codebook index(latent)、一个 6-DoF pose 向量(raw action)、甚至一段 CoT(reasoning)。这张图是全文 organizing principle。
统一框架:VLA Module 与 Action Token
定义:
- VLA module:VLA 里的 “maximal differentiable subnetwork that supports end-to-end gradient flow”,或者 non-differentiable 的 functional unit(如 motion planning)。多个组件若联合优化则算同一 module。
- Action token:VLA module 的输出,以及 module 内 “semantically meaningful intermediate representations”(如 latent action、goal image)。
抽象框架(Figure 1 的核心):
每一步 token “grounded and actionable” 程度递增。作者举例:
- Hi Robot:fine-tuned PaliGemma 输出 language plan(token 1)→ -like 模型输出 raw action(token 2)。
- VoxPoser:LLM 产生 language plan → LLM+VLM 产生 affordance map → motion planning → raw action,共三类 token。
❓ 这个定义的边界有点宽——“功能性 non-differentiable unit” 允许 motion planner 也算 VLA module,加上 “semantically meaningful intermediate representations” 允许非 module 输出(如 VQ-VAE codebook 里的中间状态)也算 action token。这让 taxonomy 能涵盖所有现有工作,但代价是分类门槛低、标准不锐利:几乎任何有中间表示的 pipeline 都能被归进来。好处是统一叙事,坏处是 “action token” 作为概念的 predictive power 不强。
Action Token 八分类(Section 4–11)
1. Language Description (§4)
两个子类:language plan(subtask 级,如 “pick up the cup”)和 language motion(motor 级,如 “move arm forward 75cm”)。
代表脉络:
- Zero-shot LLM planning 起步:SayCan、Socratic Models、Language Planner。用 LLM 分解指令,缺陷是无 perceptual grounding。
- 外挂 grounding:SayCan 用 affordance function 重加权、Inner Monologue 加 feedback loop、DoReMi 生成 constraints。
- VLM-based planner:PaLM-E 把 vision/language/robot state 编码到同一多模态输入、EmbodiedGPT 轻量 VLM、ViLa 用 GPT-4V zero-shot。
- 结合 generalist low-level policy:Hi Robot 和 (Pi0.5)—— high-level VLM 输出 free-form language,low-level 是通用 policy,不再局限于预设 skill set。
- Language motion 线:RT-H(RTH)引入 “move arm forward” 这种中间层帮助 multi-task data sharing;NaVILA 用 “move forward 75 cm” 指挥 locomotion。
优势:零样本调用 foundation model capability;和 VLM 输出空间天然对齐;可利用 co-training data(PaLM-E、 都验证了 world knowledge transfer);可解释、好 human-in-the-loop 干预。
限制:自然语言本身的 expressiveness 不够做 contact-rich 或 deformable 操作;大模型推理延迟。作者建议 language description 主要做 high-level planning,细粒度交给 affordance/trajectory/goal state。
2. Code (§5)
Code as Policies、ProgPrompt、Text2Motion、RoboScript、RoboCodeX 等。LLM 生成带 control flow 的可执行代码片段,调预定义 API 库。
优势:有 logical structure、可嵌第三方库、透明可审计。
Brittleness:表达力被 API 库边界死锁;符号 grounding 问题——即便代码语法对,也会在 API 预设前提(“surface is dry”)被环境违反时失败;一旦失败后果严重(硬件/对象损坏)。
未来:打造综合 API function library(多模态感知 + 推理 + action primitives);对 API 库做 formal verification;利用代码的可解释性做 interactive debugging。
3. Affordance (§6)
四种表示:keypoints(精确锚点)、bounding boxes(粗 localization)、segmentation masks(pixel 级轮廓)、affordance maps(dense scene-level heatmap,如 VoxPoser)。
优势:spatially grounded、跨 embodiment 泛化好、object-centric;VLM 的 spatial reasoning 能被直接利用。
限制:大多数方法仍是 2D,缺 3D 几何和遮挡处理;静态 affordance,不建模时间演化(lift lid 之后从 “openable” 变 “pourable”);对视觉扰动敏感。
未来方向:学 true 3D affordance(NeRF/3DGS/mesh 作为 backbone);时间动态 affordance;增强鲁棒性和 uncertainty-awareness(输出概率 affordance)。
4. Trajectory (§7)
三种形式:Point Trajectory (BEV waypoints 或 end-effector path)、Visual Trajectory (路径直接画在像素上,如 RT-Trajectory、HAMSTER)、Optical Flow (像素级 motion field,如 AVDC)。
动机:trajectory 可从 off-domain video 自动抽出,缓解 action-labeled data 稀缺;而且 trajectory-conditioned policy 比 language-conditioned policy 在 “wipe table → slide block” 这种 semantically 不同但 motion pattern 相似的任务间泛化好(RT-Trajectory 验证)。
代表:ATM(Any-point Trajectory Modeling)用少量 action-labeled data + 大量 action-free video;Im2Flow2Act 不用真机数据,用 human demo video + simulation;LLARVA/ARM4R/Magma 做 trajectory-centric pretraining(与 Genie 用 latent action 做 world model 的路数不同,trajectory 是 explicit 可解释的)。
限制:2D 缺 3D 信息(用 depth 补救);point trajectory 只有位置、缺方向,不好做 dexterous;生成模型计算贵、VLM 输出 waypoint 频率低。
5. Goal State (§8)
Hierarchical:上层生成模型(DiT/CVAE)合成未来 image/video,下层 policy 条件于 goal 执行。
单帧(如 3D-VLA 生成单张 goal image)vs 多帧(如 FLIP、VPP、Gen2Act 生成 goal video)。
优势:数据 scalable(hindsight goal relabeling 自动生成训练对);可以用 action-free video 预训练生成器;cross-embodiment 友好(训练用人类 goal state);白盒可解释;可以用 language-image alignment model 做自动评估(FLIP)。
限制:overspecification(生成了不必要的细节,policy 过拟合到伪 detail);inaccuracies(物理不合理/时序不一致);生成延迟高——AVDC 8-frame video 要 10s,Gen2Act 才 3 Hz,VPP 单步去噪也才 7-10 Hz。随着 Veo 3 等 world model 进步这些可能被缓解。
6. Latent Representation (§9)
三阶段 pipeline:Latent Construction(无监督建 latent action space)→ Latent Pretraining(VLM 学预测 latent)→ Action Fine-tuning(latent→executable command)。
三个子类:
- Vision-based(Genie / LAPA / GO-1 / UniVLA):VQ-VAE 式建模前后帧视觉变化。
- Action-based(QueST):直接 encode-reconstruct 长度为 的 action chunk;依赖 action-label,scalability 受限。
- Goal-based(GROOT/GROOT-2/OmniJARVIS):整条 trajectory 编码成 latent goal vector;主要在 Minecraft 这类虚拟 open-world 验证。
优势:能用 internet-scale action-free video + cross-embodiment data;比 raw action 更简单的 VLM pretraining target(UniVLA 用 OpenVLA 4.45% 训练时间达到 comparable 性能);能融合触觉/听觉等非视觉非语言模态。
限制:不可解释——无法像 RT-H 那样 human intervention;granularity、comprehensiveness、task-centric alignment 都是未解。作者因此在未来架构推荐里暂不纳入 latent。
7. Raw Action (§10)
直接 VLM → 6-DoF pose / gripper state。这一章篇幅最大,按技术路线分六支:
- Vision-language feature fusion:LangLfP、BC-Z(FiLM 调制)。
- Transformer-based generalists:Gato、VIMA、LEO、JARVIS-VLA。
- Autoregressive Robot VLA:RT-1、RT-2、RT-X(OXE);开源线 RoboFlamingo → OpenVLA → OpenVLA-OFT / TinyVLA / HiRT / MoManipVLA。
- Video pretraining + robot fine-tuning:GR-1、GR-2(video 预训练 → 条件于 video 生成的 plan 来出 action)。
- Diffusion-based action chunking:Octo、π0、RDT、CogACT、HybridVLA;动机是 autoregressive 难建模 multi-modal 连续分布,且单步推理限制频率。
- Heterogeneous dataset / unified action space:UniAct(codebook + embodiment-specific MLP head)、GR00T N1(embodiment-specific action space + data pyramid)。
- 最近进展:Real-Time Chunking(用 flow matching inpainting 解决 chunk 边界不连续)、-FAST(对 action chunk 做 DCT tokenization,13.2× 压缩且平滑)、 with knowledge insulation(backbone 在离散 action + VL data 上预训练,action expert 独立训,梯度不回传防 catastrophic forgetting)。
核心 trade-off:raw action 最直接、最少 prior,符合 bitter lesson;但 real-world action data 比 web data 稀少 200,000 倍(作者估算 OXE tokens ≈ LLM 语料的 1/200000),cross-embodiment 迁移差,fine-tuning 容易 catastrophic forgetting。
8. Reasoning (§11)
定义:explicitly externalized 自然语言 deliberative process,不直接表示动作,而是增强其他 action token 的生成——是个 meta-token。RAD 用 reasoning 增强 raw action,DriveVLM 用 reasoning 增强 trajectory,ECoT 用 fixed CoT reasoning steps 增强 raw action。
演化:CoT prompting → LLM + 外挂感知(Inner Monologue)→ VLM-based(ECoT、RAD)→ 专为 embodied reasoning 训练的 VLM(Cosmos-Reason1 用 GRPO+SFT on physical common sense)。
优势:桥接 instruction-action gap;可解释;cross-embodiment(高层 plan 跨机器人一致)。
限制:显著拖慢推理;reasoning steps 经常是手工固定的;高质量 reasoning 数据稀缺。
未来:更快的 foundation model;更好的 reasoning 数据合成(ECoT 和 RAD 已经尝试自动 pipeline);adaptive test-time compute;action-token-based reasoning(不只在语言空间思考)。这是本文的一个重要 vision。
Data Pyramid(§12)
三层:
- Bottom:web-scale vision-language + human video(Something-Something V2、Ego4D、Ego-Exo4D、EPIC-KITCHENS-100),最充足但最不 embodiment-aligned。
- Middle:合成/仿真数据(MimicGen、RoboCasa、AgiBot Digital World),可扩但 sim-to-real gap。
- Top:real robot data(OXE、DROID、 dataset、AgiBot World),最稀缺但最 actionable。
OXE 累计 token 估算约是 LLM 语料的 1/200,000,印证了 real action data 是当下最硬的瓶颈。
推荐架构与趋势(§13)
Figure 4 的 take-away:Venn diagram 把 AGI = Embodied AI ⊃ VLA ∪ Hardware ∪ Robotics,把 VLA 放在 Digital AI/Hardware/Robotics 三者交集、且是 AGI 必经之路。
推荐的 hierarchical 架构(§13.1 最核心的 normative 立场):
- 顶层:language description + code,做长时 planning 和 logic control。
- 中间层:3D affordance + trajectory + goal video,提供 precise motion 表征。
- 底层:policy 把中间表征映到 raw action;短期靠 hierarchical 结构 bootstrap data flywheel,长期走 end-to-end subtask→raw action。
- Reasoning 贯穿各层,未来从 language-based 变成 action-token-based + adaptive test-time compute。
- Latent representation 暂缓——granularity / comprehensiveness / alignment 三道坎没过前,不如 explicit token 好控制。
其他 normative claims:
- VLA model → VLA agent:加 memory、exploration、reflection;架构从 linear 变 graph-structured;关注 multi-agent + human-agent co-existence。
- IL → RL:IL 天花板是人类 demonstrator,RL 能自我探索超越;但 real-world reset 成本高,需要 sample-efficient RL(如 in-context RL)+ VLM 自动生成 dense reward。
- Hardware:gripper 必须让位给 dexterous hand;tactile/audition/olfaction 等模态不可再缺。
- Safety:embodied AI 错了是 physical harm,不是 chatbot 失言,safety 必须 first-class。
- Data scarcity:四个维度不足——总量、模态覆盖、embodiment 兼容、质量(尤其 dexterous 场景)。两条路:更好用 simulation + web data;开发更靠谱的 in-the-wild 数据采集系统。
❓ 这个 hierarchical 推荐其实和 π0.5 的架构高度吻合(unified 模型先预测 language subtask 再 continuous action),也符合 GR00T N1 的 System 1 / System 2 设计。作者在推结论时似乎部分是在 rationalize 自家体系(PsiBot Joint Lab)和近期 -series 的 design choice。但这个方向判断和社区的 consensus 接近,不算 over-fitting。
关联工作
基于
- Foundation model evolution(§2):Transformer → BERT/T5/GPT → VLM 族(BLIP/LLaVA/Qwen-VL/PaliGemma)。PaliGemma 作为 -series backbone 被多次强调。
- Action token 的概念溯源:把 “action token” 类比 “language token” 是本文最核心的 conceptual move,显然是向 LLM 叙事致敬。
对比
其他 VLA survey(参考 HuggingFace 同期也出现 arxiv 2508.13073 “Large VLM-based VLAs for Robotic Manipulation” 和 arxiv 2505.04769)。本文的 differentiator 是 action tokenization 作为 organizing principle,而非 “按 task 分” 或 “按 backbone 分”。这是个有辨识度的 lens。
方法相关
覆盖的代表作包括 SayCan、PaLM-E、RT-2、RT-H、OpenVLA、ECoT、π0、NaVILA、RoboVLMs、Hi Robot、OpenVLA-OFT、GR00T N1、MoManipVLA、π0.5、GO-1、Genie、LAPA、UniVLA 等;以及 VoxPoser、Code as Policies 这类 code-based 工作。
论文点评
Strengths
- Organizing principle 有辨识度:用 “action token 形态” 做分类维度比 “按任务/按 backbone” 更本质,因为它直接刻画了每个方法的 inductive bias 和 data requirement。
- 分类覆盖面广:8 类 token + 每类一个 section(带 Table),几乎把 2022-2025 有代表性的 VLA 都收了。做 literature survey entry point 很方便。
- 有 opinionated 立场:§13.1 直接给出 hierarchical 架构推荐,并明确暂缓 latent、reasoning 要走 action-token 化、raw action 是长期方向。不是纯 cataloging。
- Data pyramid + hardware/safety/RL 的跨章讨论把 VLA 的 systems-level 瓶颈讲清了——特别是 OXE/LLM 1:200000 的粗略量级对比很有冲击力。
- GitHub repo 作为 companion paper list 方便追踪。
Weaknesses
- “Action token” 定义过宽(前文 ❓):既包含可微 module 输出,又包含 module 内中间表示,又包含 non-differentiable unit 的输出——几乎任何 pipeline 都能装进来,辨识度被稀释。
- 缺对比式实验/ meta-analysis:全书几乎不做”在同一 benchmark 下不同 token 谁赢” 的定量比较。token 类别之间的 trade-off 都是 qualitative,读者很难判断”如果我只能选一类 token,该选谁”。
- Reasoning 章节偏薄:RAD、ECoT、DriveVLM、Cosmos-Reason1、AlphaDrive 几例说完就结束;而 “action-token-based reasoning”(本文 normative claim 里最新颖的概念)没有具体实例 grounding。
- Latent 的暂缓判断理由薄:UniVLA 已经用 4.45% 训练时间达到 OpenVLA comparable 性能,是个强信号,作者却主要以 “interpretability 差” 为由暂缓推荐,这个权衡没算细账。
- Hierarchical 架构推荐 suspiciously 贴合 :作者来自 PKU-PsiBot Joint Lab,这个架构观跟近年 -series(Hi Robot、)靠得很近,可能有 “合理化近期工作” 的嫌疑,虽然方向判断本身合理。
可信评估
Artifact 可获取性
- 代码:N/A(survey)
- 模型权重:N/A
- 训练细节:N/A
- 数据集:N/A;但 github repo 列了完整的 VLA paper list 和所述 dataset 的引用。
Claim 可验证性
- ✅ “VLA 可被统一到 module + action token 框架”:定义足够宽可容纳所有现有工作;更像 analytical lens 而非可证伪 claim。
- ✅ “8 种 action token 覆盖现有 VLA”:可在 Table 2-9 每表一个 token 类别的代表作里核对,分类是 exhaustive 的。
- ⚠️ “未来最好的 VLA 是 hierarchical 组合”:作者的 normative 立场,证据主要来自 、GR00T N1、RT-H 这几条线的实证;但没排除 “大一统 end-to-end raw-action” 走通的可能(§10.8 作者自己也提到这个对照)。
- ⚠️ “latent representation 因 interpretability 差而不该纳入”:UniVLA 的训练效率是反证,作者处理 superficial。
- ⚠️ “OXE tokens ≈ LLM 语料的 1/200,000”:具体引用 GR00T N1,数量级对比意义大于精确值。
Notes
- 把 “action token” 看作 “language token 的 embodied counterpart”是本文最 generative 的概念——它让 VLA 的很多设计选择(tokenization scheme、auto-regressive vs diffusion、chunk size、DCT 压缩)都可以 map 到 LLM 里的对应技术史。这种类比可以 predictively 用来想下一步:e.g. 如果 raw action 要做 MoE / sparse expert、要做 speculative decoding、要做 distillation,都有 LLM 侧的 prior。
- 但类比也有天花板:language token 的 vocab 是 discrete 且 finite,action token 尤其 raw action 是 continuous + embodiment-specific,-FAST 的 DCT 表示、action chunking、flow matching 都在处理这个 mismatch。这一点本文没 surface 得足够重。
- 未来可验证的 downstream prediction:若本文 hierarchical 架构判断正确,2026-2027 的主要 VLA SOTA 会明显向 π0.5 / GR00T 这类分层式靠近;若 raw-action end-to-end 继续突破(如更大 dataset 出现后 OpenVLA 类 scale up),则作者的 normative 判断需要修正。
Rating
Metrics (as of 2026-04-22): citation=65, influential=3 (4.6%), velocity=6.73/mo; HF upvotes=39; github 520⭐ / forks=18 / 90d commits=0 / pushed 293d ago · stale
分数:2 - Frontier 理由:总 citation 65、velocity ~6.7/mo、HF 39 upvotes,作为 survey 流量不错但不爆;influential_citations 只有 3/65 = 4.6%,显著低于典型 ~10%,说明多数引用是 “landmark reference”(当一本 VLA 教科书式引用),而本文提出的 “action tokenization” 分类框架还没被后续工作实质继承作为 reference frame——这是它够不上 3-Foundation 的主要信号。另一方面,github repo 在 2025-07 之后已 stale(293d 无 push,90d commits=0),survey 的 paper list 更新停滞,会逐步降低长期价值。但作为 2025 年 VLA 领域最系统的调研之一、且 opinionated 给出了 hierarchical 架构 recommendation,对研究者理解 landscape 价值高,配 2-Frontier 适当。