Summary
An Embodied Generalist Agent in 3D World
- 核心: 首个能在 3D 世界中感知、推理、规划和行动的 embodied 多模态 generalist agent
- 方法: Object-centric 3D 表示 + LLM,两阶段训练(VL alignment + VLA instruction tuning),LLM 辅助生成高质量 3D-language 数据
- 结果: 在 3D captioning、QA、embodied reasoning、navigation、manipulation 等任务上超越 task-specific 模型
- Sources: paper | website | github
- Rating: 2 - Frontier(3D embodied generalist 方向的代表性早期工作与常见 baseline,object-centric 3D + LLM 范式有影响力,但尚未成为 de facto standard)
Key Takeaways:
- Object-centric 3D 表示是连接 3D 和 LLM 的有效方案: 相比 3D-LLM 的复杂 feature aggregation,object-centric point cloud + Spatial Transformer 更简洁且效果更好
- 两阶段训练(alignment → instruction tuning)对 3D VL 理解至关重要: Ablation 显示 alignment stage 对 Scan2Cap 等细粒度理解任务提升显著
- Generalist 训练优于 specialist: 多场景多任务的 instruction tuning 不仅不损害单任务性能,还带来跨场景零样本泛化能力
- VL 和 VLA 存在 tension: 加入 embodied acting 任务反而会降低 VL 性能,VL 和 action 的联合学习仍是开放问题
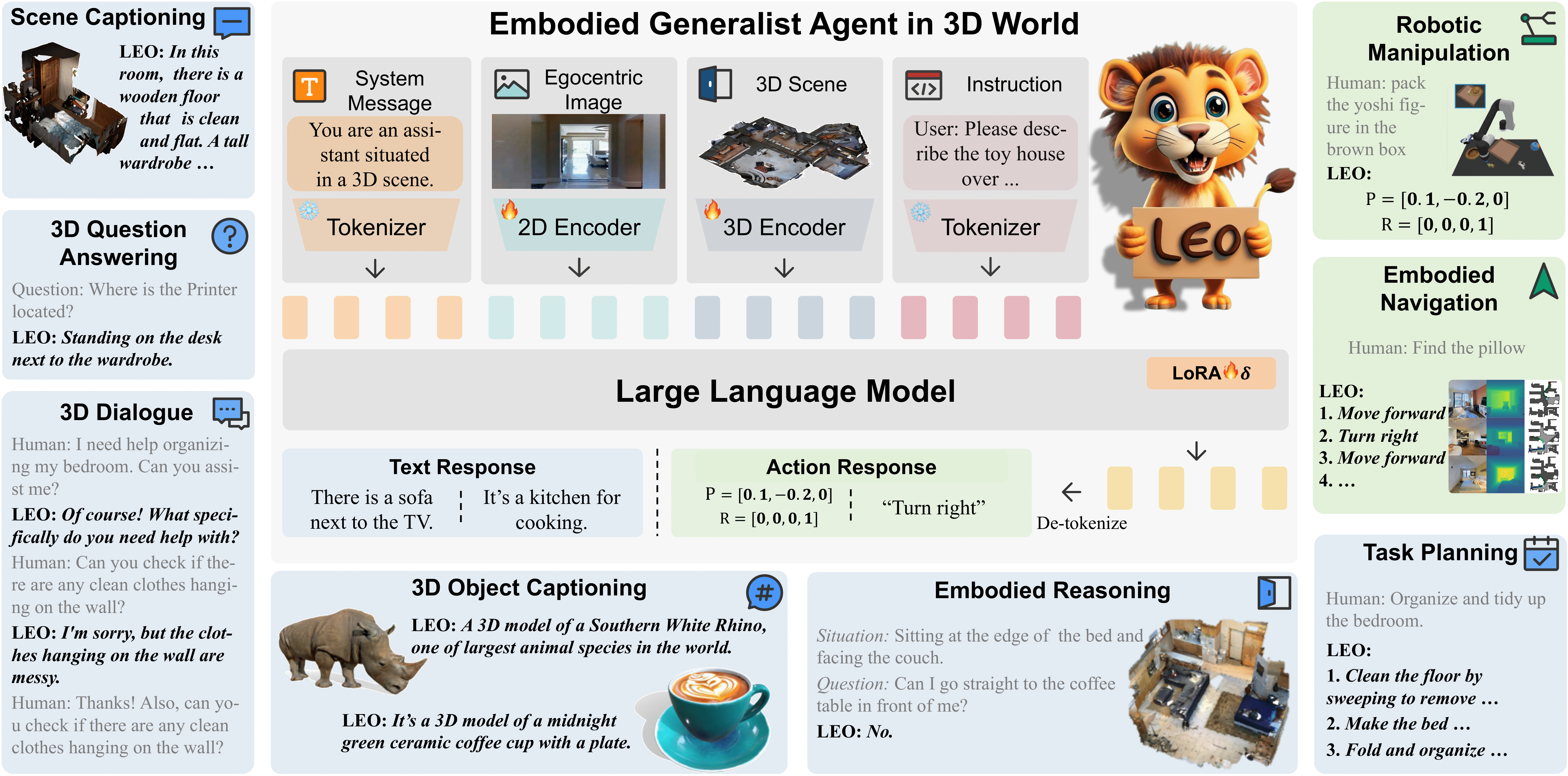
Teaser. LEO 系统概览:接收 2D 图像、3D 点云和文本,统一为 autoregressive sequence prediction 完成多模态多任务
Introduction
构建能在 3D 世界中理解和交互的 generalist agent 面临三大挑战:(1) 缺乏合适的 3D 数据集;(2) 缺乏统一模型架构;(3) 缺乏有效学习策略。现有 generalist 模型(Gato、PaLM-E、RT-2)主要在 2D domain 中工作,缺少对 3D 物理环境的理解能力。LEO 提出用 object-centric 3D representation + LLM 构建统一框架,同时处理 perceiving、grounding、reasoning、planning 和 acting。
Model
LEO 将所有模态数据转换为 token 序列,统一送入 decoder-only LLM 处理:
Equation 1. Unified token sequence
符号说明: 为 ego-centric 2D image tokens, 为 object-centric 3D tokens, 为 response tokens 含义: 所有任务(VL 理解、embodied acting)统一为给定 prefix 的 autoregressive language modeling
Video. Scene representation
Video. Model pipeline
Tokenization
- Text: SentencePiece tokenizer(32k subwords)
- 2D: Ego-centric 2D images → OpenCLIP ConvNext 编码
- 3D: Scene point cloud → Mask3D object proposals → 各 object point cloud → 3D encoder(PointNet++)→ Spatial Transformer → object-centric 3D tokens
- Action: 连续动作离散化,离散动作映射到 SentencePiece 中最低频的 reserved tokens
Token Embedding & LLM
- Text & 2D: Embedding look-up table + OpenCLIP ConvNext encoder,MLP adapter 对齐维度
- Object-centric 3D: PointNet++ → Spatial Transformer(用相对位置和尺寸偏置 attention score,捕捉物体间 3D 空间关系)
- LLM: Vicuna-7B + LoRA(冻结 LLM 主体,仅调优 LoRA 参数)
Training & Inference
Equation 2. Prefix language modeling loss
符号说明: 为 system message 到 instruction 的所有 prefix tokens, 为 response tokens 含义: 标准 prefix language modeling,仅对 response 部分计算 loss
训练时冻结 3D point cloud encoder 和 LLM,微调 2D image encoder、Spatial Transformer 和 LoRA 参数。总参数量 ~7B,可训练参数 ~142M。推理使用 beam search 生成文本,action 通过映射还原。
Datasets
LEO 采用两阶段训练数据:LEO-align(3D VL alignment)和 LEO-instruct(3D VLA instruction tuning)。
Table 1. 数据统计
| Dataset | Task | 2D required? | 3D assets | data |
|---|---|---|---|---|
| LEO-align | object captioning | ✗ | Objaverse | 660k |
| LEO-align | object referring | ✗ | ScanNet + 3RScan | 354k |
| LEO-align | scene captioning | ✗ | 3RScan | 20k |
| LEO-instruct | 3D captioning | ✗ | ScanNet | 37k |
| LEO-instruct | 3D QA | ✗ | ScanNet + 3RScan | 83k |
| LEO-instruct | 3D dialogue | ✗ | 3RScan | 11k |
| LEO-instruct | task planning | ✗ | 3RScan | 14k |
| LEO-instruct | navigation | ✓ | MP3D | 60k |
| LEO-instruct | manipulation | ✓ | CLIPort | 300k |
Video. Data pipeline overview
LEO-align: 3D Vision-Language Alignment
三类 3D captioning 数据用于 3D-language alignment:
- Object-level captions: 单个 3D 物体与描述的对齐(Cap3D / Objaverse)
- Object-in-the-scene captions: 场景中物体的 referring expression(ScanNet + 3RScan)
- Scene-level captions: 整个 3D 场景的自然语言描述(3RScan)
LEO-instruct: Instruction Following in 3D world
指令微调数据覆盖六类任务:
- 3D captioning & QA: 给定 3D 场景输入,生成描述或回答问题
- 3D dialogue & planning: 对复杂多轮指令生成灵活连贯的回复和任务计划
- Navigation & manipulation: 在 3D 环境中完成 embodied acting(ObjNav on MP3D + CLIPort manipulation)
LLM-assisted 3D-language Data Generation
核心流程:3D scene graph → LLM prompting → O-CoT → refinement
- Scene-graph-based prompting: 用 3DSSG 提供场景上下文,包含 object attributes 和 spatial relations,比 object boxes 信息更丰富
- Object-centric CoT (O-CoT): 要求 LLM 在生成时显式给出 object label 和 ID 作为 thought,减少幻觉
- Refinement: 基于 scene graph 的 human-defined filters,自动检测并修正逻辑错误(counting / existence / non-existence)
Table 2. LLM 生成数据质量评估
| Counting | Existence | Non-existence | |
|---|---|---|---|
| 3D-LLM | 56.5 | 96.8 | 40.0 |
| Ours | 57.4 | 91.3 | 27.4 |
| + O-CoT | 78.0 | 93.4 | 30.5 |
| + refinement | 100.0 | 100.0 | 100.0 |
Insights: O-CoT 对 counting 准确率提升最大(+20.6%),refinement 进一步将所有类别提升到 100%,验证了 scene graph 作为 ground truth 校验源的有效性。
Capabilities and Analyses
3D Vision-Language Understanding and Reasoning
在 Scan2Cap、ScanQA、SQA3D 三个 benchmark 上评估,使用 Mask3D object proposals(非 GT segments)。
Table 4. 3D VL 理解与 embodied reasoning 定量比较(部分)
| Scan2Cap C | ScanQA C | ScanQA EM@1 | SQA3D EM@1 | |
|---|---|---|---|---|
| Scan2Cap (specialist) | 35.2 | - | - | - |
| Vote2Cap-DETR | 61.8 | - | - | - |
| 3D-VisTA | 66.9 | 69.6 | 22.4 | 48.5 |
| 3D-LLM (FlanT5) | - | 69.4 | 20.5 | - |
| LEO | 72.4 | 101.4 | 24.5 | 50.0 |
Insights: LEO 作为 generalist 模型(无 task-specific fine-tuning)在所有任务上超越了 task-specific 模型和先前的 generalist(3D-VisTA、3D-LLM),验证了 object-centric 3D + LLM 架构的有效性。
Scene-grounded Dialogue and Planning
定性研究显示 LEO 能生成精确 grounded 到 3D 场景的回复:任务计划涉及具体 objects 和 plausible actions,描述中包含丰富的空间关系信息。
Embodied Action in 3D World
Table 5. Robot manipulation 结果
| separating-piles seen/unseen | packing-google-objects-seq seen/unseen | put-blocks-in-bowls seen/unseen | |
|---|---|---|---|
| CLIPort (single) | 98.0 / 75.2 | 96.2 / 71.9 | 100 / 25.0 |
| CLIPort (multi) | 89.0 / 62.8 | 84.4 / 70.3 | 100 / 45.8 |
| LEO | 98.8 / 75.2 | 76.6 / 79.8 | 86.2 / 35.2 |
Table 6. Object navigation 结果
| MP3D-val Success/SPL | HM3D-val Success/SPL | |
|---|---|---|
| Habitat-web (demo) | 35.4 / 10.2 | - |
| ZSON | 15.3 / 4.8 | 25.5 / 12.6 |
| LEO | 23.1 / 15.2 | 23.1† / 19.1† |
Insights: LEO 在 manipulation unseen tasks 上展现了语义级泛化能力(如 packing-google-objects unseen 超越所有 baseline)。Navigation 方面 SPL 优于 baseline 说明 object-centric 3D input 提供了粗粒度 global map,帮助缩短路径。†标注的 HM3D 是零样本迁移结果。
More Insights into LEO
Table 7. 不同数据配置的 ablation
| Scan2Cap | ScanQA | SQA3D | 3RQA | 3RDialog | 3RPlan | |
|---|---|---|---|---|---|---|
| w/o Align | 62.8 | 22.7 | 50.9 | 49.7 | 73.0 | 80.3 |
| ScanNet only | 64.0 | 24.4 | 46.8 | 35.8 | 25.5 | 23.4 |
| w/o Act | 65.4 | 24.3 | 50.0 | 51.9 | 73.3 | 81.1 |
| VLA | 65.3 | 25.0 | 46.2 | 51.3 | 72.3 | 77.2 |
Insights:
- Alignment: 去掉 alignment stage 在 Scan2Cap 上掉 2.6 分(62.8 vs 65.4),fine-grained captioning 依赖 VL alignment
- Generalist > Specialist: ScanNet-only 在跨场景(3RQA 35.8 vs 51.9)和跨任务(3RDialog 25.5 vs 73.3)上大幅下降
- VLA tension: VLA 在 SQA3D(46.2 vs 50.0)上明显低于 w/o Act,embodied acting 任务与 VL 存在学习冲突
- Data balancing: 不平衡数据导致 hallucination(object-existence 几乎全回答 Yes),augmentation 负样本后 overall 准确率从 34% 提升到 85%
Scaling Law Analysis
测试了 OPT-1.3B → Vicuna-7B → Vicuna-13B 三个 scale 的 LLM,以及有无 alignment 的影响。
关键发现:
- LEO 的 instruction tuning loss 随数据量增长呈 log-linear 下降,符合 scaling law
- 7B → 13B 的提升幅度明显小于 1.3B → 7B,暗示在当前数据规模下 LLM 可能接近 saturation,需要更多数据匹配模型容量
- Alignment 在所有数据 scale 上都带来一致的 loss 降低
关联工作
基于
- Vicuna-7B: LLM backbone
- PointNet++: 3D point cloud encoder
- Mask3D: 3D instance segmentation,提供 object proposals
- Spatial Transformer: 来自 3D-VisTA,用相对位置/尺寸偏置 attention
- LoRA: LLM 高效微调
- OpenCLIP ConvNext: 2D ego-centric image encoder
对比
- 3D-VisTA: Task-specific fine-tuned generalist,LEO 在所有任务上超越
- 3D-LLM: 使用 multi-view images 的 3D VLM,LEO 用更简洁的 object-centric 方法取得更好效果
- CLIPort: Manipulation baseline,LEO 在部分 unseen tasks 上更优
- Gato / PaLM-E / RT-2: VLA generalist 前辈,但仅处理 2D 输入
方法相关
- Cap3D: Object-level captioning 数据来源
- 3DSSG: Scene graph 数据用于 LLM-assisted data generation
- ScanNet / 3RScan: 核心 3D scene 数据集
论文点评
Strengths
- 首个统一 3D VL 和 embodied acting 的 generalist 框架: 在同一个模型中完成 captioning、QA、dialogue、planning、navigation、manipulation 六大类任务,且不需要 task-specific head
- Object-centric 3D 表示设计简洁有效: 用 Mask3D proposals + PointNet++ + Spatial Transformer 建立 object-centric token,比 3D-LLM 的 multi-view feature aggregation 更简洁,效果更好
- LLM-assisted data pipeline 设计严谨: Scene graph prompting + O-CoT + refinement 三层质量控制,counting 准确率从 57.4% → 100%,方法有技术含量
- 全面的 ablation 和 scaling 分析: 对 alignment、generalist vs specialist、VL vs VLA 等关键设计决策都做了 controlled experiments,提供了有价值的 insights
Weaknesses
- 3D scene 依赖 GT/Mask3D proposals: Object-centric 表示预设了良好的 instance segmentation,在 open-world 或 noisy perception 下是否仍然有效存疑
- VL 和 VLA 的 tension 未解决: 加入 acting 任务会损害 VL 性能(SQA3D 从 50.0 降到 46.2),作者指出但未提出解决方案
- Navigation 只用 truncated past actions: 不用 recurrent module 限制了长时序导航能力,success rate 低于 Habitat-web baseline
- 3D 数据规模仍然有限: LEO-align 约 1M、LEO-instruct 约 500K 条数据,相比 2D VLM 数据规模差距巨大,scaling law 分析也显示 data 是瓶颈
可信评估
Artifact 可获取性
- 代码: inference+training 均已开源(GitHub repo 带完整 configs/ 与训练脚本)
- 模型权重: align.pth(alignment stage checkpoint)、sft_noact.pth(instruction tuning without acting tasks checkpoint),发布在 HuggingFace
- 训练细节: 超参 + 数据配比 + 训练步数完整(configs/ 目录包含详细配置)
- 数据集: 开源(LEO_data on HuggingFace,含 scan data + language annotations + EAI data examples)
Claim 可验证性
- ✅ 3D VL 任务 SOTA:Scan2Cap / ScanQA / SQA3D 均有标准 benchmark 评估,数据和代码开源
- ✅ Alignment stage 重要性:ablation 有 controlled experiment(w/o Align vs w/o Act)
- ✅ Generalist > Specialist:ScanNet-only vs full 数据的 ablation 直接可验证
- ⚠️ “首个 embodied generalist agent in 3D world”:定义上 PaLM-E 等也处理 3D 信息,但 LEO 强调的是 explicit 3D point cloud input 而非 2D → 3D
- ⚠️ Navigation 泛化能力:HM3D 零样本结果仅与 ZSON 比较,缺少更多 baseline
Notes
Rating
Metrics (as of 2026-04-24): citation=357, influential=36 (10.1%), velocity=12.23/mo; HF upvotes=8; github 483⭐ / forks=41 / 90d commits=0 / pushed 368d ago · stale
分数:2 - Frontier 理由:LEO 是 3D embodied generalist 方向(VLA × 3D scene understanding)的代表性早期工作,object-centric 3D + LLM 的范式被后续 3D-LLM / 3D VQA / embodied reasoning 工作广泛引用和比较(ICML 2024,社区关注度高、开源完整),符合 “Frontier / SOTA / 必要 baseline” 的 2 档定位。之所以不是 3:该范式并未像 CLIP / SAM / ScanNet 那样成为 3D embodied 领域不可绕开的 building block——object-centric 依赖 Mask3D proposals 的前提在 open-world 下受限,VLA tension 也未解决;不是 1:在 3D VL + embodied action 统一框架这条线上,至今仍是常见比较对象,并未被取代。