Summary
Pure Vision-Language-Action (VLA) Models: A Comprehensive Survey
- 核心: 一篇整理了 300+ 篇 VLA 工作的综述,把 VLA 方法按策略生成范式划分为四大类——autoregression-based、diffusion-based、reinforcement-based、hybrid/specialized——并补充 dataset、simulator、hardware、challenges 四个附录式章节。
- 方法: 沿时间轴做 bucket sort,每个 bucket 再细分子类(如 autoregression 下分 generalist / reasoning+planning / trajectory generation / structural optimization);每类附一张时间顺序的表格列代表工作的 year + 一句话创新。
- 结果: 无实验,无 benchmark 再跑;定性总结每个 bucket 的 “Innovations / Limitations”,结尾列出 5 个 challenges(data scarcity / arch heterogeneity / inference cost / pseudo-interaction / eval limitations)和 4 个 opportunities(world modeling / causal reasoning / sim-real integration / societal embedding)。
- Sources: paper
- Rating: 1 - Archived。组织清晰但 taxonomy 按 “生成器类型” 切,信息密度不及同期 Action-Tokenization 视角的 VLA 综述;citation=29、influential=1、无 github,对研究议程无 load-bearing 作用。
Key Takeaways:
- 四分法 taxonomy:autoregression / diffusion / RL-finetune / hybrid+specialized。这不是一个严格正交的轴——很多现代 VLA(如 π0、HybridVLA)本身就跨桶,作者把它们塞进 “hybrid” 而非正面承认 taxonomy 的崩坏。
- “Pure VLA” 的定义模糊:标题强调 “Pure” 但正文从未明确定义什么叫 pure、与什么对立(大约是与 hierarchical / code-generation / LLM-planner-only 对立)。这是 positioning 问题,不是 technical 问题。
- 每个 bucket 的 Discussion 段都是模板化的 “Innovations / Limitations”——Innovations 罗列方法名,Limitations 几乎套用同一套话术(算力贵、数据缺、泛化差、安全难),缺乏真正的 cross-cutting insight。
- Dataset/Simulator 章节 表格价值:Table V 汇总了 MIME→OXE 的 15 个真实+10 个仿真数据集,带 episode/task 数,可作为挑 dataset 时的 quick lookup。
- Challenges 段 提出的 “understanding the instruction but failing to execute”(语义懂但身体不会)是全文唯一一句有张力的 framing,但随后没有展开成具体的技术路线判断。
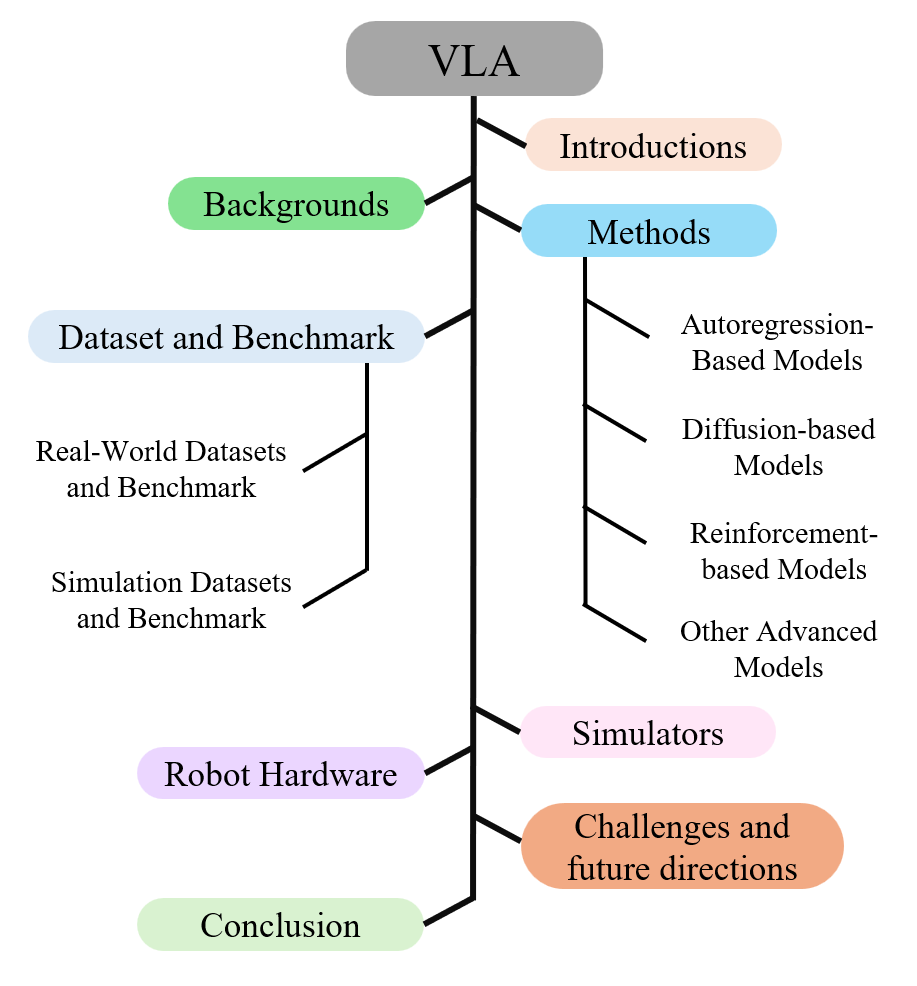
Teaser. Survey 的整体组织与章节关系图(Figure 1)。
Taxonomy 骨架
Figure 1. 调研按方法论分类 + 资源 (dataset / simulator / hardware) + challenges & opportunities 两大块组织。
结构上:Background → 4 类方法 → Data/Simulator/Hardware → Challenges & Future,是教科书式的 survey 写法,没有跨章节的 unifying thread。
Figure 2. VLA skeleton 示意图——抽象出 VLM backbone → action head 的通用管线。
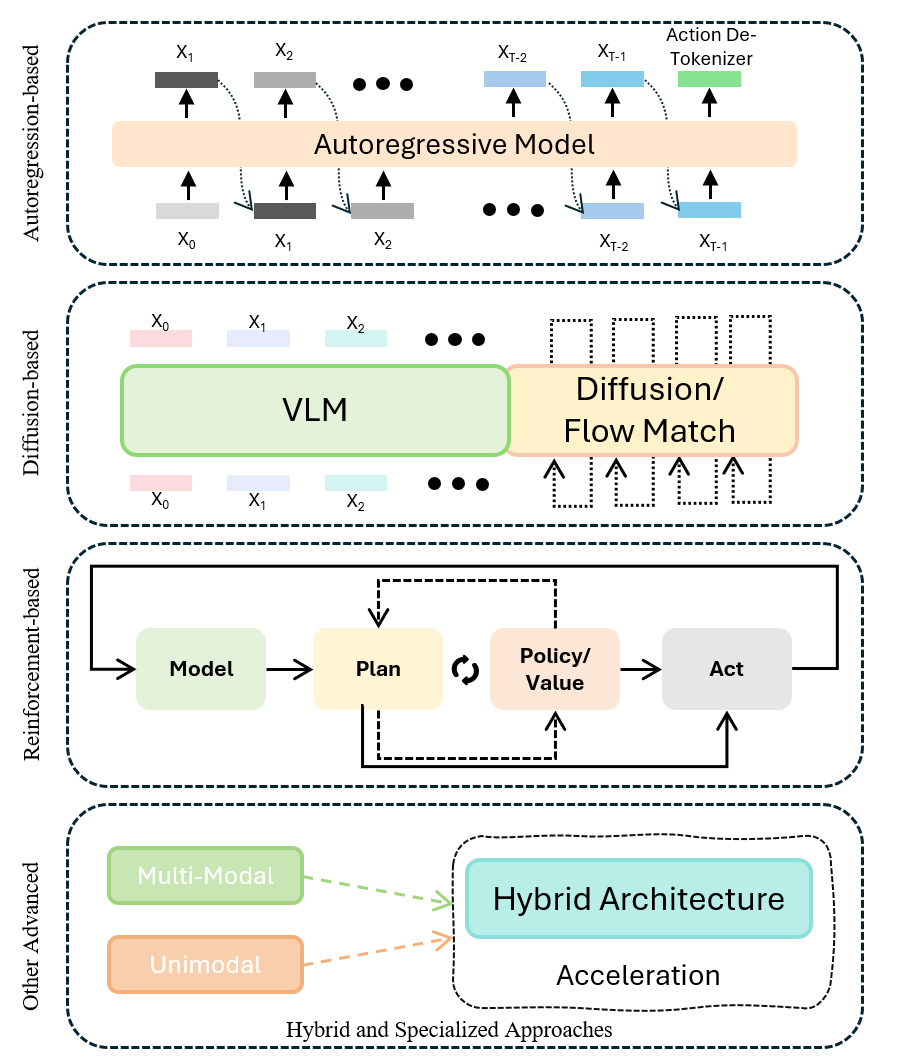
Figure 3. Taxonomy tree:沿时间轴给每个 paradigm 标代表作。
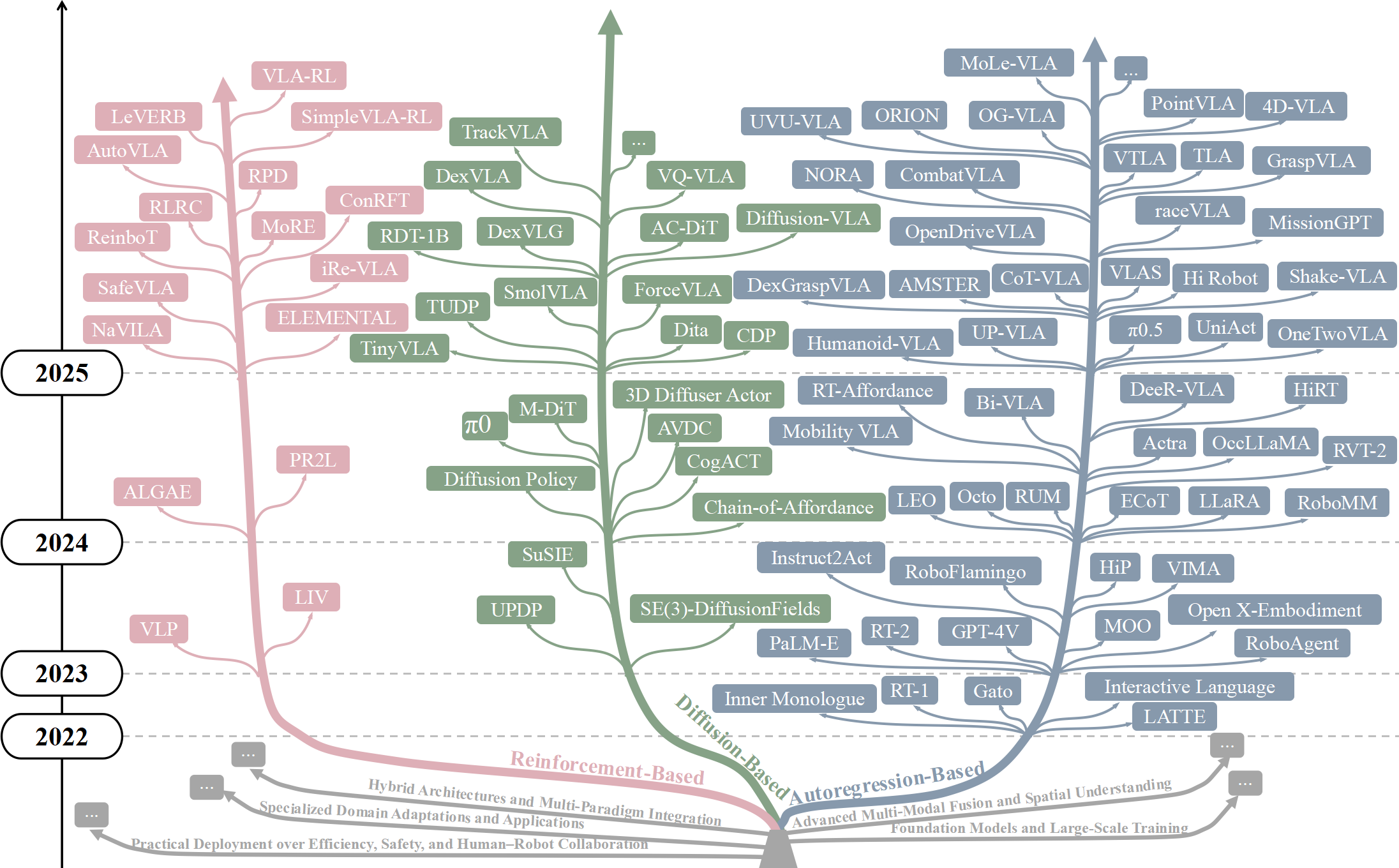
❓ 这种 “时间轴 + paradigm 分桶” 的可视化在 survey 里很常见,但它隐含了一个未被论证的假设:paradigm 之间是 parallel 发展的独立 branch。实际上 autoregression 和 diffusion 在 action head 选择上是替代关系而非 parallel branch,而 RL fine-tune 是正交的训练手段(可以叠在任何 action head 上)。这套 taxonomy 混了 architectural choice 和 training recipe 两个正交维度。
3 四大 Paradigm 详解
3.1 Autoregression-based
作者把这一桶再切成 4 小类:
- Autoregressive Generalist VLA:RT-2、OpenVLA 一脉——把 action 离散化成 token,接在 LLM 语言 token 之后 next-token-predict。
- Reasoning + Semantic Planning with LLMs:LLM 负责 high-level 任务分解 / plan,再下发给低层 policy。与 “pure VLA” 的 positioning 其实矛盾——作者没解释为什么这种 hierarchical 方案还算 “pure”。
- Trajectory Generation + Visual Alignment:把 autoregressive head 的输出改造成 trajectory 或 waypoint,而非 raw joint action。
- Structural Optimization & Efficient Inference:FAST tokenizer、action chunking、并行解码等加速手段。RT-2 的 8Hz 推理瓶颈催生出来的这一子类其实是全章最有 cross-cutting 意义的部分,但被压成最后一个小节。
讨论段的立场:作者承认 autoregressive 路线在 “high-frequency control” 上仍有延迟瓶颈,但对 “continuous vs discrete action” 的根本权衡没有给出明确判断——这正是后来 diffusion head 崛起的驱动力。
3.2 Diffusion-based
进一步分成 3 个子类:
- Diffusion Generalist:SE(3)-DiffusionFields、Diffusion Policy、以及一众把 denoising 直接套到 action space 上的工作。
- Multimodal Architectural Fusion:如何把 vision/language condition 喂进去——cross-attention、classifier-free guidance、ControlNet 式的 adapter。
- Application Optimization & Deployment:蒸馏、一步/少步采样、flow matching 取代 DDPM 等工程优化。
隐含的 claim(作者没挑明但字里行间传达):diffusion head 的动机是连续动作分布的 multimodality——相比 autoregressive 的离散 token,diffusion 更自然地建模多峰动作分布。这确实是 Diffusion Policy 原论文的核心 insight,但本综述没把这个 first-principle 论证拉到 paradigm 层面。
3.3 Reinforcement-based Fine-Tune
Table III(节选——共 22 条)给出 RL-VLA 时间线,列出每个工作的核心 RL 创新:
| Method | Year | Innovation |
|---|---|---|
| VIP / LIV | 2023 | visual-language reward 预训练,frozen VLM 也能做 reward proxy |
| GRAPE | 2024 | trajectory-level preference alignment |
| SafeVLA | 2025 | constrained policy optimization + safety critic |
| SimpleVLA-RL | 2025 | 单轨迹 + binary reward 在线 RL |
| ConRFT | 2025 | offline BC + Q-learning + online consistency 的 hybrid |
| VLA-RL | 2025 | online RL + VLM-as-reward-model |
| LeVERB / NaVILA | 2025 | RL 驱动 humanoid/quadruped whole-body control |
作者的立场:RL fine-tune 能补 SFT 的 distribution shift 和 sparse-reward 问题,但 reward engineering 仍 “indirect or noisy”,training stability 受 SFT-RL 博弈影响。
❓ 这章和 Reward Hacking、Agentic RL 领域的共性讨论几乎没交集——作者把 RL-VLA 当成 VLA 的 sub-branch 来讲,错过了一个有价值的 framing:RL fine-tune 是 training recipe,应该跨 autoregression/diffusion paradigm 正交讨论,而不是作为第三类并列 paradigm。这是前面提到的 taxonomy 维度混淆的典型表现。
3.4 Hybrid / Specialized
一个 catch-all 桶,再切 6 小类:hybrid arch、多模态融合 + 空间理解、domain adaptation(driving / humanoid / GUI)、foundation-scale 模型、deployment(效率/安全/HRI)、discussion。 把 π0.5、HybridVLA、GR00T 这类跨范式或大模型都塞进来。这一节最能暴露 taxonomy 的 leaky abstraction——真正的前沿工作往往不属于前 3 桶里的任何一个。
4 Datasets & Benchmarks
Table V 精选(完整表约 25 行):
| Dataset | Year | Sensors | Episodes | Tasks |
|---|---|---|---|---|
| MIME | 2018 | RGBD | 8.3K | 20 |
| BridgeData | 2021 | RGBD | 60.1K | 24 |
| RT-1 | 2022 | RGB | 13K | 700 |
| RH20T | 2024 | RGBD | 110K | 147 |
| DROID | 2024 | RGBD | 76K | – |
| OXE | 2025 | RGBD | >1M | 160,266 |
| LIBERO (sim) | 2023 | RGB | 5K | 100 |
| RoboCasa (sim) | 2024 | RGBD | >100K | 100 |
真实数据集:从早期 MIME / BridgeData 的 10K 量级,到 2024-2025 的 RH20T / OXE 的 100K→1M 量级;OXE 作为 22 个数据集的 consolidator 现已成为事实标准。
仿真数据集:LIBERO、RoboCasa、Meta-World、RLBench、VIMA、CALVIN 是 VLA 论文 benchmark 的主流选择。
4.3 Discussion:作者承认”real 贵、sim 不真”是老命题,承认当前 benchmark 的 success rate / trajectory L2 不足以覆盖 language grounding、long-horizon reasoning、safety,但没有提出具体的新评测协议建议。
5-6 Simulators + Hardware
Simulators:THOR、Habitat 1/2、iGibson 1/2、MuJoCo、Isaac Gym、CARLA、LGSVL 等——这部分是 embodied AI 的标配资源清单,本综述没有新增信息。
Hardware(§6 短短一页):泛泛提到 sensors / actuators / control / power 四件套,没有具体分析 manipulator vs quadruped vs humanoid 的硬件差异对 VLA 设计的约束。这一章基本是凑篇幅性质。
7 Challenges & Opportunities
Challenges(5 条)
- Scarcity of Robotic Data:OXE 主要覆盖 tabletop,sim-real gap 未解。
- Architectural Heterogeneity:vision backbone (ViT / DINOv2 / SigLIP)、LLM (PaLM / LLaMA / Qwen)、action head (discrete token / continuous / diffusion) 的 cross product 导致难以横向对比。
- Real-Time Inference:autoregressive decode 的 token-by-token 延迟 + 大模型内存占用让 VLA 在 embedded 平台上 “太慢或太贵”。
- Pseudo-Interaction:模型依赖 statistical co-occurrence 而非真正的 causal probing。这是全文唯一一句有力 framing:“understanding the instruction but failing to execute”。
- Evaluation Limitations:benchmark 局限于 lab setting + tabletop manipulation,outdoor / industrial / home 场景覆盖率低。
Opportunities(4 条)
- World Modeling + Cross-Modal Unification:把 language/vision/action 统一进 single token stream,让 VLA 演化成 proto-world-model。
- Causal Reasoning + Genuine Interaction:从 “静态分布 prediction” 转向 “interactive probing + feedback adaptation”。
- Virtual-Real Integration + Large-Scale Data Generation:类比 GPT 用 internet-scale corpus,embodied 需要 trillion-trajectory 数据生态。
- Societal Embedding + Trustworthy Ecosystems:安全、可解释、问责框架。
❓ Opportunities 这四条都是当下 embodied AI 社区的 consensus(world model / causal / data-scale / safety),综述没提出作者独有的判断——比如”四条里哪个是真正的瓶颈、哪个是伪命题、哪个最接近突破”。
关联工作
对比
- World Model Survey: 同时期的综述,按 domain 切(gaming / autonomous driving / embodied),与本综述按 paradigm 切形成对比。World Model 综述把 VLA 作为应用方向之一,本综述把 world model 作为 VLA 的 future opportunity——两者互补。
- Action Tokenization Survey (arXiv 2507.01925): 2025-07 的另一篇 VLA 综述,从 action tokenization 这个统一维度切入——比本综述”按生成器分类”的 taxonomy 更深、更 first-principle。两篇覆盖面类似,但那篇抓住了”如何把 action 离散化 / 连续化 / 层级化”这一关键技术维度。本综述在 novelty 上被压制。
- Computer-use Agent Survey: 另一个 “action-producing agent” survey,但在 digital(GUI)领域。对比可见 embodied VLA 与 GUI agent 在 taxonomy 维度上其实面临相同问题:如何在 “LLM backbone × action representation × training recipe” 三维矩阵里组织工作。
涵盖的代表工作(本 vault 已有笔记)
- Autoregression 代表:RT-2、OpenVLA、OpenVLA-OFT
- Diffusion 代表:Octo、RoboVLMs、SmolVLA
- Hybrid / Foundation:π0、π0.5、Hi Robot、GR00T N1、MoManipVLA
方法相关
- Flow Matching / Diffusion Policy: Section 3.2 的核心技术底座;π0、SmolVLA 系列已把 flow matching 当成 action head 标配。
- Action Chunking + FAST tokenizer: Section 3.1.4 efficient inference 子类的关键技术。
- OXE / DROID: 作为 VLA 训练数据的 de facto 基础,已被反复引用。
论文点评
Strengths
- 覆盖面确实广:300+ 篇论文、含 autonomous driving 和 humanoid 分支,作为 “entry point reading list” 对新入场的研究者有用。
- Table 形式高效:Table I–IV 每张表都按年份列 method + 一句话 innovation,适合查表而非通读。
- Dataset + Simulator 汇总有 quick-lookup 价值:Table V 给了 episodes / tasks 数量,是挑 benchmark 时的便利参考。
- “Pseudo-Interaction” 和 “语义懂但身体不会” 的 framing 有洞察——可惜没展开成章。
Weaknesses
- Taxonomy 的维度混淆:autoregression / diffusion 是 action head 的选择,RL-finetune 是 training recipe,hybrid / specialized 是 catch-all。这四桶不正交,导致后期工作(π0、HybridVLA)难以归类,只好塞进 “hybrid” 桶。一个更诚实的 taxonomy 应该把 action representation、training recipe、deployment target 作为三个正交轴。
- “Pure VLA” 定义缺失:标题的 “Pure” 从未在正文被定义;估计是想与 hierarchical / LLM-as-planner 划界,但没有明说。positioning 模糊。
- Discussion 段同质化:每桶的 “Innovations / Limitations” 两段模板几乎雷同——“算力贵 / 数据缺 / 泛化差 / 安全难”。缺少真正的 cross-cutting 观点,如”diffusion head 相比 autoregressive head 在什么任务上有 consistent 优势、什么任务上没有”。
- 被同期综述压制:2025-07 的 Action-Tokenization 综述从单一技术维度切,深度更好;本文 2025-09 发表但在 taxonomy 创新上没超过前者。
- 无 github、无 reading list:VLA 综述在 Awesome-VLA repo 满天飞的当下不配套 GitHub,对实用价值是明显减分。
- 第 6 章 Hardware 极简:一页泛泛介绍 actuator/sensor,与 VLA 方法几乎无交互,是凑篇幅段落。
可信评估
Artifact 可获取性
- 代码: 未开源(Survey 本身无 artifact)
- 模型权重: N/A
- 训练细节: N/A
- 数据集: N/A(只是综述,不产 dataset)
Claim 可验证性
- ✅ “300+ studies synthesized”:references 确有 300+ 条,表面核查可信。
- ⚠️ “Comprehensive taxonomy”:taxonomy 确实覆盖面广,但前述维度混淆让”comprehensive”要打折——正交性不足导致后期工作难归位。
- ⚠️ “Classifies VLA approaches into several paradigms”:分类成立,但”是否是 useful 的分类”未被论证。
- ❌ “A clear taxonomy” —— “clear” 是 marketing 修辞,与正文 hybrid 桶的 leaky abstraction 相矛盾。
Notes
- 值得从本综述中挑走的只有 Table V(dataset 汇总)和 Challenges 段的 “pseudo-interaction” framing;其余内容可以被同期的 Action-Tokenization 综述和各篇原始论文替代。
- 对于已有 VLA 方向 context 的读者(我们),本文的新增信息量接近零;对于入门读者可作为 reading list 的起点。
- 综述 paradigm 分桶的教训:按”方法家族”切 taxonomy 容易落入”把工作塞桶”的陷阱,而不是回答”这些工作共同在回答什么问题”。后者才是有 insight 的 survey 组织方式。
Rating
Metrics (as of 2026-04-22): citation=29, influential=1 (3.4%), velocity=4.1/mo; HF upvotes=0; github N/A(无代码仓库)
分数:1 - Archived
理由:发表 7 个月 citation=29(velocity 4.1/mo)在”VLA survey”这个拥挤赛道里是中等偏下——同期 Action-Tokenization 综述和更早的 World Model / ACU Survey 都在更好地占据 taxonomy 位置;influential citation 仅 1 篇 (3.4%),远低于典型 ~10%,说明被真正引用为”这一方向 foundational reference”的工作极少,多数是被当作 related-work 列表里顺手一提。无 github、无 reading list repo,社区传播渠道也弱。综上:不到 Frontier(不够新、不够深、不够有 positioning),归 Archived——作为 reading list 的起点翻一次足矣,不值得重读。