Summary
A Survey on Efficient Vision-Language-Action Models
- 核心: 首个系统性综述围绕「Efficient VLA」主题,沿 model-training-data 三支柱组织近两年 ~100+ 方法,试图把碎片化的加速/压缩/数据节约工作收进一个统一分类。
- 方法: 三支柱 taxonomy——(1) Efficient Model Design(efficient architecture + model compression);(2) Efficient Training(efficient pre-training + efficient post-training);(3) Efficient Data Collection(human-in-the-loop / simulation / internet-scale / self-exploration / augmentation)。每支柱配 Discussion 小节讨论 innovation & limitation。
- 结果: 把 SARA-RT、OpenVLA-OFT、RoboMamba、FAST、TinyVLA、SmolVLA、pi0、LAPA、SimpleVLA-RL、VLA-RFT 等典型方法归到细粒度子类,并附四张表格汇总 representative works。
- Sources: paper | website | github
- Rating: 1 - Archived(6 个月 14 citations / 0 influential / 149 stars / 仓库 107 天未推进;作为 efficient VLA 入门 reading list 有价值,但 taxonomy 深度和批判性不足,很快会被同主题后来者取代)
Key Takeaways:
- 三支柱 taxonomy 是本综述的主要结构贡献:Model / Training / Data 对应 VLA 部署的三大成本瓶颈(参数 & latency / 算力 & 样本 / 数据采集)。
- VLA 特有 efficiency 痛点:VLM backbone 量级(RT-2-PaLI-X 55B / OpenVLA 7B)导致控制频率只有 1-6 Hz,远低于机械臂实时控制所需的 20-50 Hz;pi0 / GR00T N1 的 2-3B 参数规模+并行解码把频率推到 20-50 Hz,是当前 efficient VLA 的主流目标区间(见 Tab. I)。
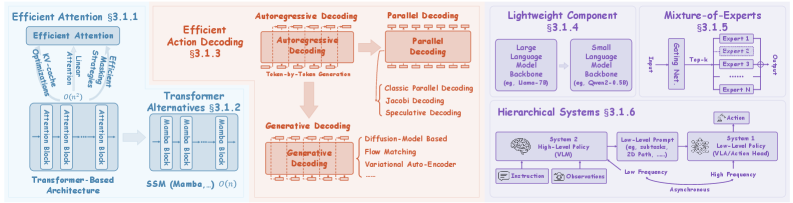
- Efficient Architecture 的六个子类:efficient attention、transformer alternatives(Mamba 系)、efficient action decoding(parallel / generative)、lightweight components、MoE、hierarchical systems(System-1/2 解耦)。
- Model Compression 三板斧:layer pruning、quantization、token optimization——后者(token pruning / caching / merging)在 VLA 语境下最活跃,因为 visual token 是序列长度的主要贡献者。
- Efficient Pre-training 的核心主线是压缩 action 空间:LAPA / RynnVLA / LAWM 用 autoencoder 蒸 latent action;FAST 用 DCT+BPE 直接在序列域压缩;这和 data-efficient 的 egocentric video pretraining 是互补的两条路径。
- 关于作者对”pre-training vs post-training”的重定义:综述把”从 VLM 迁移到 action-capable policy”全部叫 pre-training(包含 LoRA 等通常被叫做 post-training 的方法),把”对具体任务做 specialization”叫 post-training——这个切分 VLA-centric 但在和主流 LLM 文献对话时会混淆。
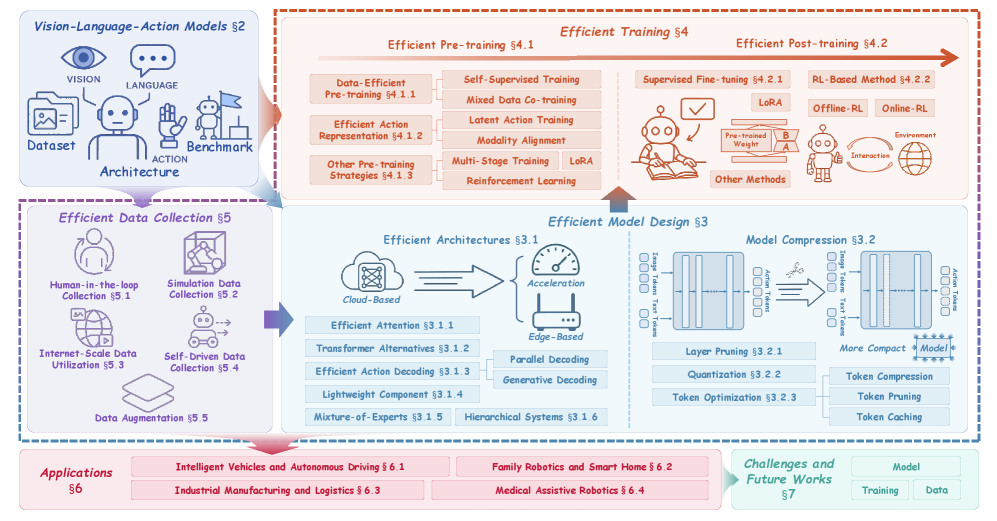
Teaser. 三支柱 taxonomy 鸟瞰图。 作者把 efficient VLA 的所有方法折叠进 3 个顶级支柱、10+ 二级子类,是全文的主线图。
Figure 1. Taxonomy overview(三支柱 + 示意图标)
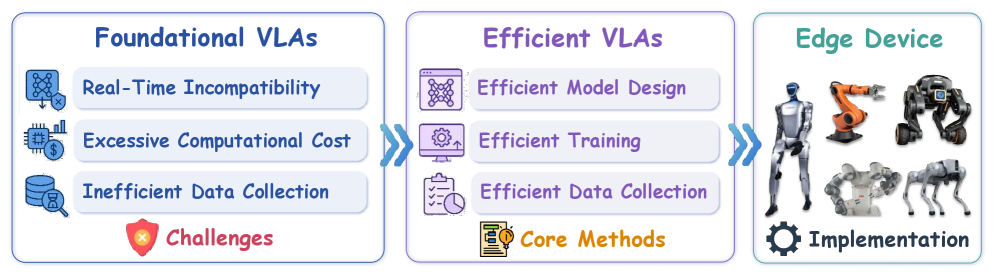
Figure 2. 完整 taxonomy 树(方法-子类对应关系)
2 Vision-Language-Action Models 背景
2.1 VLA Foundational Pipeline
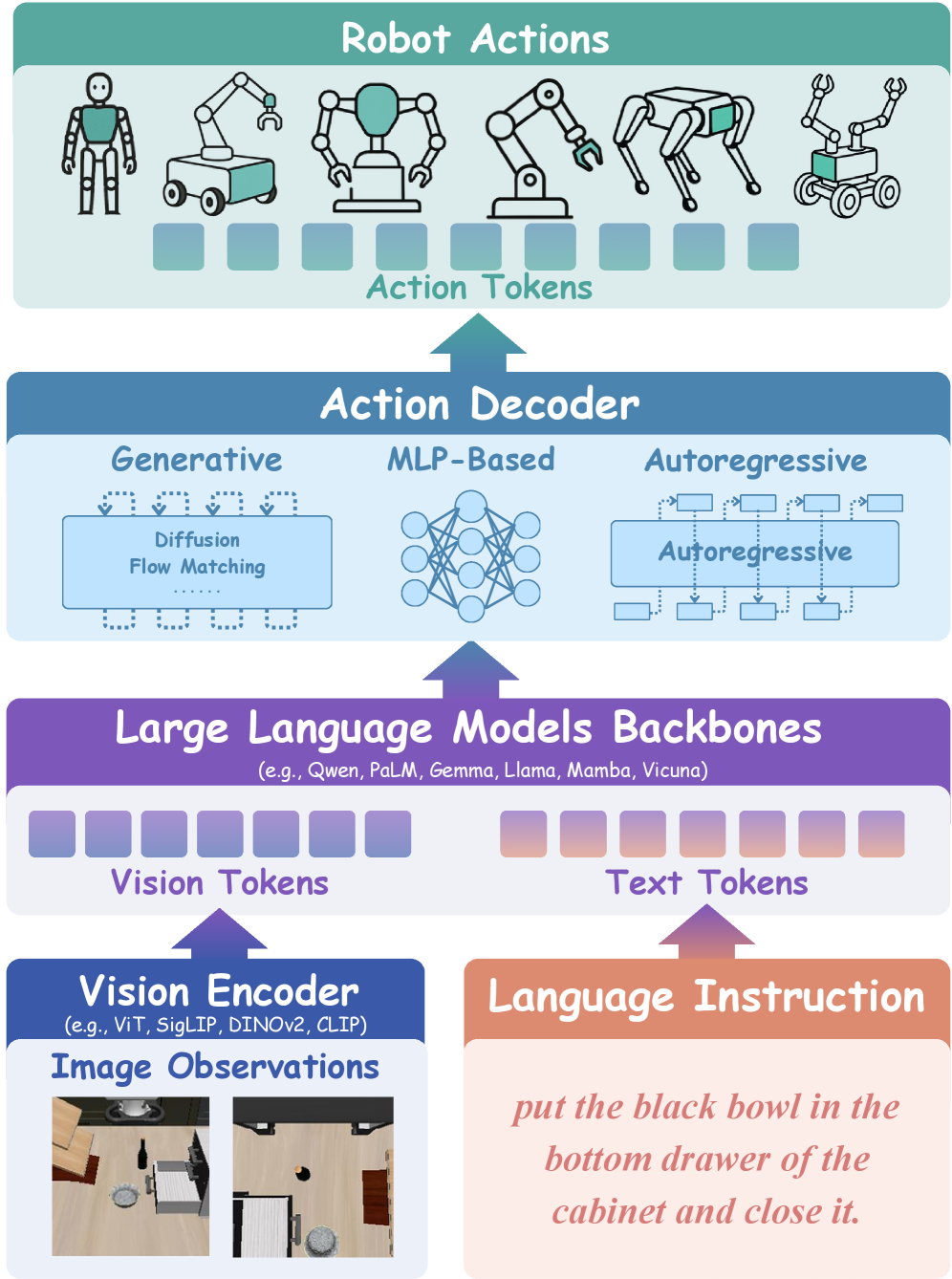
VLA 的标准架构可拆成三个模块:vision encoder → LLM backbone → action decoder。
Figure 3. VLA 三段式管线:Vision Encoder / LLM Backbone / Action Decoder
Equation 1. Vision Encoding
Equation 2. LLM Backbone 融合
Equation 3. Action Decoding
Vision encoder 常用 ViT / SigLIP / DINOv2 / CLIP;LLM backbone 跨 Qwen / PaLM / Gemma / Llama / Mamba / Vicuna;action decoder 三种流派:diffusion/flow matching、autoregressive token decoding、MLP head。
2.2 为什么需要 Efficient VLA
作者用 Tab. I 把问题讲清楚——主流 VLA 的参数量和控制频率严重不匹配实时 robotics:
Table 1. 代表 VLA 的效率指标
| Model | Params (↓) | Infer. Latency (ms) (↓) | Freq. (Hz) (↑) |
|---|---|---|---|
| RT-2-PaLI-X | 55B | 330–1000 | 1–3 |
| RT-2-PaLI-X | 5B | 200 | 5 |
| OpenVLA | 7B | 166 | 6 |
| π0 | 3.3B | 73 | 20/50 |
| HiRobot | 3B | 73 | 10/50 |
| GR00T N1 | 2.2B | 63.9 | - |
❓ 表格引用的是论文自报频率,没统一硬件口径(π0 的 50 Hz 是 chunk-level 而不是 token-level),这是行业普遍问题但综述没拆明白。
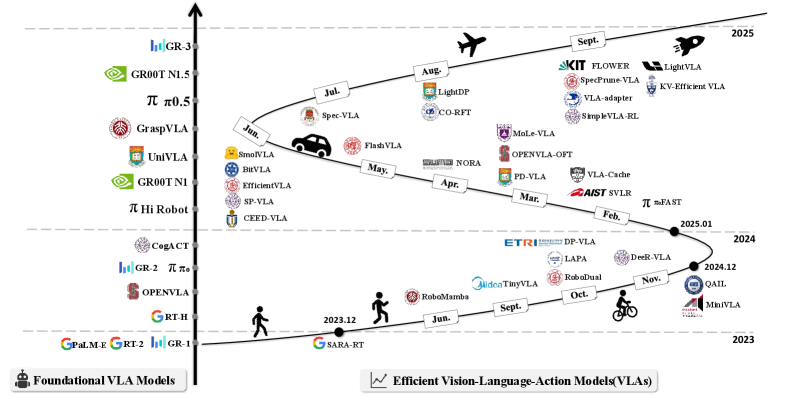
Figure 4. Foundational VLA vs Efficient VLA timeline:2023-2025 两条并行发展曲线,Efficient VLA 自 2024 下半年起进入爆发期。
2.3 与其它 VLA Survey 的差异
作者列了 6 篇已有 VLA survey(Ma et al., Shao et al., Xiang et al., Zhong et al. 等),声称已有 survey 只是顺带提及 efficiency,而没有以 efficiency 为主轴做统一 taxonomy。这个 claim 在 2025-10 时大体成立,但 2510.17111(Efficient VLA for Embodied Manipulation: A Systematic Survey)和本文几乎同时发布,是直接竞争。
3 Efficient Model Design
Figure 5. Efficient Architecture 六子类:(a) efficient attention;(b) transformer alternatives;(c) efficient action decoding;(d) lightweight component;(e) MoE;(f) hierarchical systems。
3.1 Efficient Architectures
3.1.1 Efficient Attention. 三轴优化:linear-time attention(SARA-RT 用 up-training 把 quadratic transformer 转成 linear-attention)、efficient masking(Long-VLA 的 phase-aware masking、dVLA 的 prefix attention + KV cache)、KV-cache optimization(RetoVLA 用 register token 复用,KV-Efficient VLA 用 RNN-gated chunked KV)。
3.1.2 Transformer Alternatives. 以 Mamba 为代表的 SSM:RoboMamba 首次把 Mamba 作为 VLA language backbone;FlowRAM 把 region-aware Mamba 耦合 conditional flow matching。
3.1.3 Efficient Action Decoding. 当前最活跃的子方向,两条路线:
- Parallel Decoding:OpenVLA-OFT 用 bidirectional attention 取代 causal mask,单前向预测 K 长度 action chunk;PD-VLA 把 AR decoding 改写为 Jacobi 迭代的 fixed-point 方程;CEED-VLA 在 PD-VLA 基础上做 early-exit 和 consistency distillation;Spec-VLA 引入 speculative decoding 并放宽 acceptance。
- Generative Decoding:TinyVLA 把 Diffusion Policy 作为专用 decoder;HybridVLA 把 diffusion 和 AR 合并到单个 transformer,DDIM 压到 4 步;FreqPolicy 用频域一致性做 flow-based policy;FlowRAM / NinA 用 flow matching / normalizing flow 做单步生成;VQ-VLA / Discrete Diffusion VLA 在 discrete token 空间内做 diffusion refinement。
3.1.4 Lightweight Component. 直接减参数量:RoboMamba 的 3.7M MLP head(占总参数 0.1%);TinyVLA 的 <1.4B VLM;EdgeVLA / MiniVLA 用 Qwen2-0.5B + SigLIP + DINOv2 组出 1B 模型;CLIP-RT 用冻结 CLIP 做 unified encoder,参数是 OpenVLA 的 1/7 却超过 24% 成功率;SmolVLA 主打单卡训练;NORA 用 Qwen2.5-VL-3B + FAST+ tokenizer。
3.1.5 Mixture-of-Experts. GeRM 首次把 sparse MoE 用到 quadruped RL;FedVLA 提出 Dual Gating MoE(DGMoE)的双向 token-expert affinity;TAVP 用 Task-Aware MoE 把任务-task routing 解耦。
3.1.6 Hierarchical Systems. 借用 dual-process theory(System 1/2):HiRT、DP-VLA、SmolVLA 用低频 VLM 指导高频 policy;RoboDual 把 OpenVLA 作为 high-level planner,加轻量 DiT specialist 做 latency-aware 协同;HAMSTER 用 2D trajectory sketch 桥接 high-level VLM 和 low-level policy;FiS 用参数共享融合 System 1/2;MinD 用低频 world model + 高频 diffusion policy。
3.2 Model Compression
Figure 6. Model Compression 三子类:layer pruning / quantization / token optimization(compression / pruning / caching)。
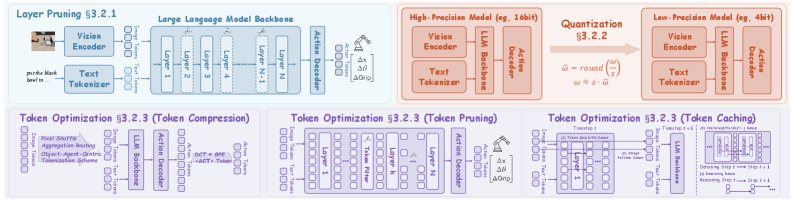
3.2.1 Layer Pruning. DeeR-VLA 的 multi-exit dynamic early termination;MoLe-VLA 的 spatial-temporal layer skipping;SmolVLA 直接砍 L/2 层;EfficientVLA 做 training-free 跨层 redundancy 分析;RLRC 用 RL 在 pruning 之后恢复性能;FLOWER 用 modality fusion 腾出 50% LLM 层给 diffusion head。
3.2.2 Quantization. OpenVLA 证明 7B VLA 可直接 int8 量化不掉点;QAIL 做 quantization-aware imitation learning;FAST 用 DCT-based tokenization 让 high-frequency action 更易量化;BitVLA 把 vision encoder 蒸到 1-bit ternary;SQAP-VLA 把 quantization 和 token pruning 联合设计。
3.2.3 Token Optimization. 本综述认为是 VLA 压缩的最活跃子方向:
- Pruning:FlashVLA / LightVLA(Gumbel-softmax 可微分 token selection)/ SpecPrune-VLA / CogVLA(FiLM-routed instruction-driven pruning)/ ADP / Oat-VLA(object-centric + gripper-guided)。
- Caching:VLA-Cache 做 task-aware static visual token caching;HybridVLA 在 diffusion 前缓存 KV;Fast ECoT 在多 timestep 缓存 high-level reasoning tokens;CronusVLA 用 FIFO motion feature queue。
- Compression:SmolVLA 用 pixel shuffle 把每帧 visual token 压到 64;VOTE 用单个
<ACT>token 取代 action chunk。
3.3 Discussion(综述作者的观点)
Innovation:从 scaling-centric 转向 adaptive 架构,compression + 蒸馏保 perceptual-motor invariant。
Limitation:aggressive compression 易造成 semantic drift;hierarchical/parallel 框架有 spatiotemporal coherence 问题;依赖 static importance metric 限制环境适应性——需要 hardware-algorithm 协同设计。
❓ Discussion 写得比较 high-level,没有具体方法的失败案例;例如 “semantic drift 在哪个任务 / 哪个模型上被实证出来过?” 没有 ground。
4 Efficient Training
Figure 7. Efficient Training 两阶段:(a) Efficient Pre-Training(data-efficient / action representation / 其它);(b) Efficient Post-Training(SFT / RL)。
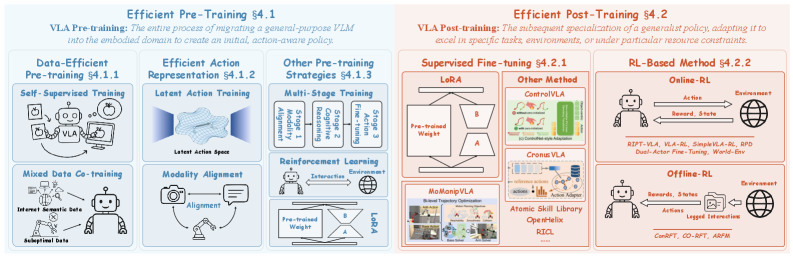
4.1 Efficient Pre-Training
作者对 pre-training / post-training 的切分是 VLA-centric——“把 general VLM 迁移成 action-capable policy” 都叫 pre-training,不管用的是 LoRA 还是 full FT;“对具体任务做 specialization” 才叫 post-training。这个切分在 VLA 语境下合理,但和主流 LLM literature 冲突。
4.1.1 Data-Efficient Pre-training. 两类:self-supervised training(从 expert trajectory 或 egocentric video 提信号)和 mixed-data co-training。
4.1.2 Efficient Action Representation. 是本综述的一条重要主线——
- Action space compression:LAPA / Bu et al. / RynnVLA-001 / LAWM 都基于 autoencoder 蒸 latent action(前二用 VQ-VAE,RynnVLA 用 VAE,LAWM 从 DreamerV3 world model 提 latent);FAST 用 DCT+BPE 做序列域压缩(5× 预训练时间缩减)。
- Innovative action modeling:EgoVLA 用 MANO 参数做 human-robot 共享 action space;VLA-Adapter 用 Bridge Attention;cVLA 在 image coordinate 而非 robot base frame 做 action encoding;ReSET 把 action state distribution 压成 anchor state set。
4.1.3 其它 Pre-training Strategies. Multi-stage training(RoboMamba / DexVLA 等);RL-based pre-training(GeRM 的 CQL / TAVP 的伪环境);LoRA adapter 注入。
4.2 Efficient Post-Training
4.2.1 Supervised Fine-tuning. OpenVLA 系统比较 5 种策略证明 LoRA 最平衡;OpenVLA-OFT 进一步把 parallel decoding + action chunking + L1 regression 整合;InstructVLA 把 LoRA adapter 和 MoE-adaptation head 合并;MoManipVLA 用 50 条 real demo 做 bi-level trajectory optimization 迁移到移动操作;ControlVLA 用 ControlNet-style zero-init projection 做 10-20 shot 适配;OpenHelix 只训练一个 <ACT> token embedding 冻结 MLLM;RICL 把 In-Context Learning 引入 VLA post-training。
4.2.2 RL-Based Methods.
- Online RL:RIPT-VLA 用 sparse binary reward + rejection-sampled PPO,15 iter 把成功率从 4%(SFT)拉到 97%;VLA-RL 把 trajectory 当多轮对话,用 VLM-derived dense reward;SimpleVLA-RL 基于 OpenVLA-OFT + GRPO,1 traj/task 从 17.3% → 91.7%;RPD 用 MSE-aligned PPO 把 teacher VLA 蒸到小 policy。
- Offline RL:ConRFT / CO-RFT 用 Cal-QL 抑制 OOD value overestimation;ARFM 在 flow matching loss 上自适应 scaling,相对 π0 baseline +4.5% 多任务 + 11.4% 扰动鲁棒性。
4.3 Discussion
Innovation:data-thrifty 迁移成主流,latent action + spectral compression 压缩 policy search space,pre-train 和 task specialization 解耦通过 RL 实现精细化。
Limitation:human video 和 robot 的 kinematic 差异引入噪声;PEFT 在 multi-stage manipulation 中 representational flexibility 不够;RL 受 reward misspecification + distribution shift 困扰。
5 Efficient Data Collection
Figure 8. Efficient Data Collection 五类:human-in-the-loop / simulation / internet-scale & cross-domain / self-exploration / augmentation。

5.1 Human-in-the-Loop
CLIP-RT 用自然语言 interface 替代 expert teleop;GCENT 把人定位成「只在失败时 rewind-and-refine 的 guardian」,实现 one-operator–multiple-robots。
5.2 Simulation Data Collection
GraspVLA 的 SynGrasp-1B(billion-frame 合成抓取);GeRM 的 QUARD-Auto(Isaac Gym 四足);cVLA 用 ManiSkill;RoboTwin 2.0 用 code-agent 闭环生成双臂数据;ReBot 提出 real-to-sim-to-real(真轨迹 + 多仿真场景 + 真背景 inpainting);R2R2R 从手机扫描 + 单条 human video 合成大规模数据(不用物理仿真);RealMirror 用 WebXR 做低延迟 teleop-sim 混合框架。
5.3 Internet-Scale & Cross-Domain
- SmolVLA:策展 HuggingFace 上零散社区数据,用 VLM 自动生成标签;证明数据量小一个数量级也能 SOTA,关键是质量+多样性。
- Egocentric video 路径:EgoVLA 提出”把人当机器人”;RynnVLA-001 用 pose estimation 做自动化 egocentric video curation;EgoScaler 从 egocentric video 抽 6-DoF object trajectory(无需标注);Being-H0 把粒度提升到精细 hand pose。
- Video diffusion 桥接 embodiment:MimicDreamer 用 video diffusion 把人类 demonstration video 转成机械臂视觉;DreamTransfer 用 diffusion transformer 做 multi-view 一致的 robot video generation。
- 第三人称视频:Humanoid-VLA 从 third-person human-motion video 提结构化信号,扩展可用数据范围。
5.4 Self-Exploration
- Task-agnostic exploration:AnyPos(ATARA)用 RL 驱动均匀覆盖 end-effector workspace,建立”机器人能做什么”的 kinematic prior。
- Online RL as data collector:SimpleVLA-RL 的 generate-evaluate-optimize 循环;DiffusionRLVLA 用 diffusion policy 生成 multi-modal 轨迹(质量超过人类 demo)。
- World model as virtual environment:World-Env 用 LIBERO 做 VLM-guided reward RL;VLA-RFT 直接学 data-driven world model 取代高保真物理仿真器。
5.5 Data Augmentation
- Linguistic/semantic:LLaRA 把 BC dataset 转成 conversational instruction-response;InstructVLA 用 GPT-4o 生成多层级 annotation;RoboChemist 注入 failure-retry scenario。
- Trajectory/state:CLIP-RT 的 Stochastic Trajectory Augmentation;ReconVLA 用 Grounding DINO 自动分割 gaze region 做 visual reconstruction 预训练。
- Visual modality:ERMV 用 Epipolar Motion-Aware Attention 跨视角/时间一致地编辑 4D 数据。
5.6 Discussion
Innovation:从 teleop 转向 compute-driven,跨域 manifold alignment 把 internet-scale human video 当 kinematic proxy。Limitation:sim-to-real 和 embodiment gap 没解决;internet-scale data 缺 precise action label,对高精度任务仍需 in-domain expert supervision。
6 Applications
四大应用场景:Autonomous Driving(AdaThinkDrive / IRL-VLA / AutoVLA / DiffVLA)、Family Robotics(on-device 隐私)、Industrial Manufacturing(CIPHER 在 3D 打印业做多角色切换)、Medical Assistive(on-premise 数据保密 + 个体化)。内容偏愿景性,方法上未引入新信息。
7 Challenges & Future Works
沿着 Model / Training / Data 三支柱对应写:
- Model:compactness vs expressivity 张力;hierarchical 路由开销;sub-billion 参数下的 long-horizon 退化。
- Training:PE-FT 的计算节省 vs representational flexibility 损失;RL 的 high-variance gradient & reward sparsity;action representation compression 扭曲 kinematics。
- Data:human collection 贵,synthetic 缺真实感,augmentation 注入 bias,self-exploration 需要 curation。
Future:context-aware dynamic token pruning、modality-agnostic backbone、hardware-software co-design;federated + differential privacy、physics-informed pre-training、meta-learning/curriculum;diffusion-guided synthesis、curiosity-driven multi-agent exploration、自我进化的生成式数据生态。
关联工作
基于 / 串起的代表 VLA
- RT-2:VLA 范式开端,被综述作为效率基准(55B 参数 / 1-3 Hz)。
- OpenVLA:open-source VLA 基线,FT 策略对比、int8 量化示范都绑定在 OpenVLA 上。
- OpenVLA-OFT:efficient action decoding 代表作,parallel decoding + action chunking + L1 regression 的组合范式。
- π0 / π0.5:flow-matching 派系的代表,综述用作 latency baseline。
- GR00T N1:2.2B 参数大型 humanoid VLA,综述里是效率-能力平衡的正面例子。
- SmolVLA:几乎每一节都出现——lightweight component / layer pruning / visual token compression / internet-scale 数据策展。
- Hi Robot:hierarchical 系统的代表(与 HAMSTER 同一思路)。
对比 / 同主题 survey
- Ma et al. 2024 VLA Survey:更广义的 VLA 综述,作者指出其未以 efficiency 为主轴。
- 2510.17111(Efficient VLA for Embodied Manipulation: A Systematic Survey):与本综述几乎同时发布、高度重叠,缺乏互相比较和 positioning 是本文的一个弱点。
- VLA Tokenization Survey (2507.01925):从 action tokenizer 角度切分 VLA,和本综述 Section 4.1.2 的 “efficient action representation” 高度相关但视角更聚焦。
方法相关(综述中核心技术的原始出处)
- Mamba / SSM:RoboMamba / FlowRAM 的骨干。
- VQ-VAE:LAPA、VQ-VLA 的 action tokenizer 原型。
- Diffusion Policy:TinyVLA / HybridVLA / FlowRAM 生成式解码的基础。
- LoRA:几乎所有 PEFT 路线的核心。
- FAST action tokenizer:频域 + BPE 的 action 压缩,综述同时归入 action representation 和 quantization。
论文点评
Strengths
- Timing 合适:2024H2 起 efficient VLA 工作爆发,综述为社区提供一个及时的 reading list 和 taxonomy 骨架。附带 GitHub 维护 paper list(149⭐)比综述本身的延伸价值更高。
- 三支柱 taxonomy 涵盖面够全:model / training / data 的切分对应 VLA 部署的实际成本结构,比”按算法类型”切分更有工程导向性。每个支柱下的二/三级子类划分合理,能帮读者快速定位方法。
- Efficient Action Decoding 子章节是亮点:把 parallel decoding(Jacobi、speculative、bidirectional attention)和 generative decoding(diffusion、flow matching、VQ、normalizing flow)对齐讨论,揭示”action 生成速度”这条主线。
- Table I 直接对比 VLA 的 params / latency / freq:给读者 grounded 的数量级参考(而不是抽象的 “efficient”),这是很多综述缺的。
Weaknesses
- 写作风格过度修辞(“herald”、“ethos”、“thrift”、“curtail”、“transmute” 充斥全文),信息密度被稀释;中文读者和非母语作者阅读成本高。更糟的是这种风格掩盖了对方法的具体分析——很多段落读完记不住技术要点,只记得形容词。
- Critical depth 不足:Discussion 小节虽然每章都有 Innovation / Limitation,但都是泛泛而谈(“semantic drift”、“reward misspecification”),没有引用具体论文的 failure case、没有横向定量对比(例如同一 benchmark 上不同 compression 方法的 success rate vs speedup 曲线)。
- 与并行综述的 positioning 缺失:2510.17111(几乎同时)、2507.01925(action tokenization 视角)、2502.06851 都在同主题,作者在 Related Surveys 仅列名未对比差异。对读者选哪本看缺乏引导。
- Pre-training / Post-training 的重定义引入新的混淆:VLA-centric 的切分把 LoRA 归入 pre-training,读者在和通用 LLM 文献对话时会绊倒。与其重定义术语,不如在现有术语下新增一个维度(如 “VLM→VLA migration” vs “task specialization”)。
- Rating 指标弱:发布 6 个月 / 14 citation / 0 influential / github 149⭐ / 仓库 107 天未推进(pushed_at 2026-01-05)/ 90d commits=0,说明社区在用它的 reading list 而不在引用分类学本身;综述的核心贡献(taxonomy)很难被量化继承。
可信评估
Artifact 可获取性
- 代码:仓库 YuZhaoshu/Efficient-VLAs-Survey 是 paper list(markdown);综述本身不涉及代码实验。
- 模型权重:N/A(综述类)。
- 训练细节:N/A(综述类)。
- 数据集:N/A(综述类)。
Claim 可验证性
- ✅ “是第一个聚焦 efficient VLA 的 survey”:在 2025-10 发布时间点大体成立;并行 survey 2510.17111 仅早 10 天,重合度高但 scope 不同(manipulation-only vs 全 VLA)。
- ⚠️ “三支柱 taxonomy 是 unified framework”:分类本身合理,但”统一”略 overclaim——多数方法同时触及 2-3 个支柱(如 FAST 同时是 action representation、quantization、token compression),综述用重复列举处理,taxonomy 的正交性不强。
- ⚠️ Tab. I 的 latency / frequency 数字:来自各自原论文自报,硬件和 chunk-level vs token-level 的口径不一,直接对比有误导性。
- ❌ “establishes a foundational reference for the community”:abstract 中的自评,属于 marketing 修辞。是否 foundational 由引用模式决定,当前 metrics 还不支持。
Notes
- 这篇综述对我的价值:作为 efficient VLA 方向的 “paper index”——我可以用它的 Tab. II/III/IV/V/VI 快速定位某类方法的代表作。但要理解具体方法还是要看原论文。
- Efficient action decoding(尤其 parallel + generative 的融合)是我关心的 VLA 方向中 ROI 最高的加速路线,值得单独开 topic 深挖。
- Pattern:综述里反复出现的一个信号是 “3B 参数 + 20-50 Hz” 正在成为 deployable VLA 的新工程基线(π0、GR00T N1、SmolVLA),7B+ 在实时控制场景已显偏大——后续挑选论文可以这个阈值做 filter。
Rating
Metrics (as of 2026-04-22): citation=14, influential=0 (0%), velocity=2.3/mo; HF upvotes=6; github 149⭐ / forks=6 / 90d commits=0 / pushed 107d ago
分数:1 - Archived
理由:发布 6 个月 14 citation / 0 influential / velocity 2.3/mo 对一篇综述偏低;149 GitHub stars 说明社区在用它的 reading list 而非引用 taxonomy 本身,且仓库 90d 无 commit(pushed 107 天前)显示作者维护动力已衰减。同方向的并行综述(2510.17111、2507.01925)也压缩了它成为 de facto reference 的窗口。之所以还不是”完全无价值”——作为 efficient VLA 2024-2025 这个时间切片的分类 index 有即时查询价值,值得升到 Frontier 档;但作为知识结构本身,taxonomy 的正交性、critical depth、positioning 都撑不起 Frontier 或 Foundation。综合上述:1 - Archived——作为 Paper index 查阅时拿出来用,不在主脉络中。