Summary
HAMSTER: Hierarchical Action Models For Open-World Robot Manipulation
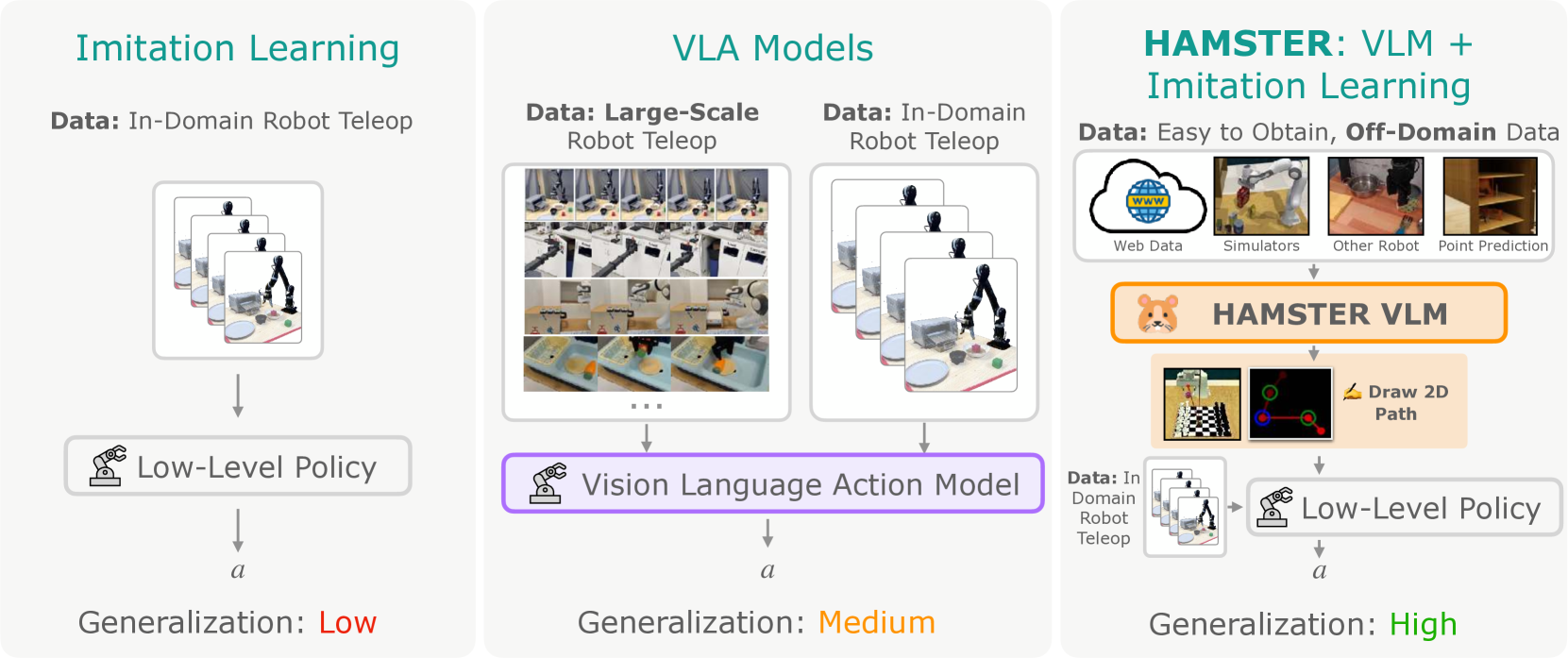
- 核心: 把 VLA 拆成两层——高层 VLM 预测端执行器在图像平面的 2D 路径,低层 3D policy 以该路径为条件执行精细动作;关键收益是高层可以用 action-free 的 off-domain 数据(sim / 异构机器人 / 视频)训练。
- 方法: 微调 VILA-1.5-13B 在 RoboPoint (770k) + RLBench sim (320k) + Bridge/DROID (110k) 上预测
[(x_t, y_t, gripper_open_t)]路径(RDP 简化);低层 RVT-2 / 3D Diffuser Actor 通过把路径叠画到 RGB 或拼接通道消费该路径;高层只在 episode 开头推理一次。- 结果: 真机 74 任务 222 次评估,HAMSTER 平均比 OpenVLA 高 20 pp 成功率(~50% 相对提升),比 3D policy baseline 高 ~3x;Colosseum 上用 50% 数据达到 2x 3D-DA 的成绩;VQA benchmark 基本保持 VILA-1.5-13B 水平没被 catastrophic forgetting。
- Sources: paper | website | github
- Rating: 2 - Frontier(把”2D 轨迹作 VLM/policy 接口”这条路线做成完整的 off-domain pretrain 配方,引用 96、influential 3、方向代表作,但 repo 标 “beta” 且 1 年无更新,未成标准 checkpoint)
Key Takeaways:
- 2D path 是高带宽但 embodiment-agnostic 的接口: 比 keypoint affordance(MOKA、RoboPoint)信息更丰富,比直接 action token(OpenVLA、RT-2)更好从 off-domain 数据学习;能同时用前向运动学 / 点追踪 / 人手视频生成监督。
- Hierarchy 的真正价值是数据来源解耦,不是分工: RT-Trajectory、MOKA 已证明轨迹条件化有用;HAMSTER 新增 claim 是 fine-tune VLM 生成轨迹(而不是 prompt 通用 VLM)能显著提升准确度,关键前提是轨迹监督能从便宜数据得到。
- Path-conditioning 实现细节不 trivial: 把路径叠在 RGB 上会被 RVT-2 的 virtual reprojection 碎片化;改成 6-channel 拼接(RGB + path-only RGB)success 从 0.83 升到 1.00,novel camera 从 0.73 升到 0.98——说明”如何注入路径”的设计空间未被充分探索。
- 共训练 VQA 保住了通用能力: 加入 660k LLaVA VQA 数据后,14 个 VQA benchmark 上 HAMSTER 与 VILA-1.5-13B 打平,证明 co-training 能缓解 robot-specific fine-tuning 的灾难遗忘。
- Asynchronous 推理是 underappreciated 的工程红利: 高层 VLM 每 episode 只跑 1 次,低层 policy 高频运行;OpenVLA 13B 端到端在 4090 只有 6Hz,HAMSTER 的 VLM 规模不再受频率约束。
Teaser. Hierarchical VLA 概览——VLM 输出 2D 轨迹,3D policy 按轨迹执行。
Body
1. Motivation: Monolithic VLA 的数据瓶颈
核心问题:OpenVLA、RT-2、π0 这类 monolithic VLA 把 VLM 直接微调成 action 预测器,必须吃 on-robot(image, proprio, action)三元组。这种数据只能靠遥操采,即便有 Open-X、DROID 这种社区协同努力,规模仍远低于 web-scale 语言/视觉数据。
另一头,小的 3D policy(RVT-2、3D Diffuser Actor、Diffusion Policy)精度高、局部鲁棒,但对 distractor、光照、新语义极脆弱。
作者提出:把 VLM 和 policy 用一个”便宜监督能得到的”中间表征连起来,让高层生成语义层的 guidance,低层专注几何执行。候选表征要满足:
- 从图像序列易提取(点追踪 / 前向运动学即可);
- 跨 embodiment(人手、不同机械臂都能产出);
- 对 dynamics 细节鲁棒。
选定:end-effector 在图像平面的 2D 轨迹 p = [(x_t, y_t, gripper_open_t)],归一化像素坐标 + gripper 开关状态。
2. Method
Figure 2. HAMSTER 执行流程:VLM 单次推理生成 2D 路径,低层 policy 按路径与环境交互。
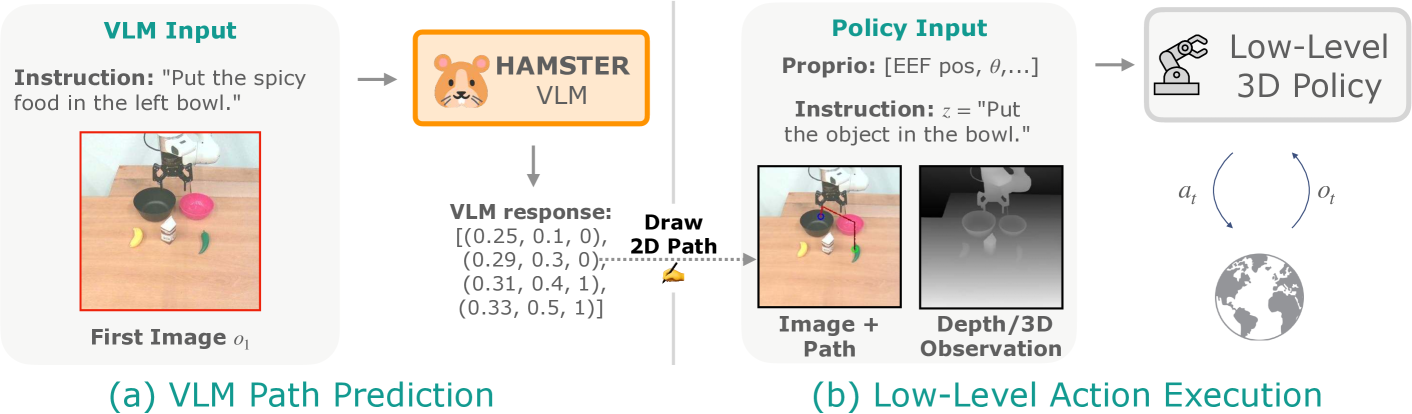
2.1 高层:VLM 路径生成
Base model: VILA-1.5-13B(interleaved image-text + video caption 预训练)。
Prompt 形式(取自 website source):
In the image, please execute the command described in
<quest>...</quest>. Provide a sequence of points denoting the trajectory of a robot gripper…<ans>[(0.25, 0.32), ..., <action>Open Gripper</action>, ...]</ans>
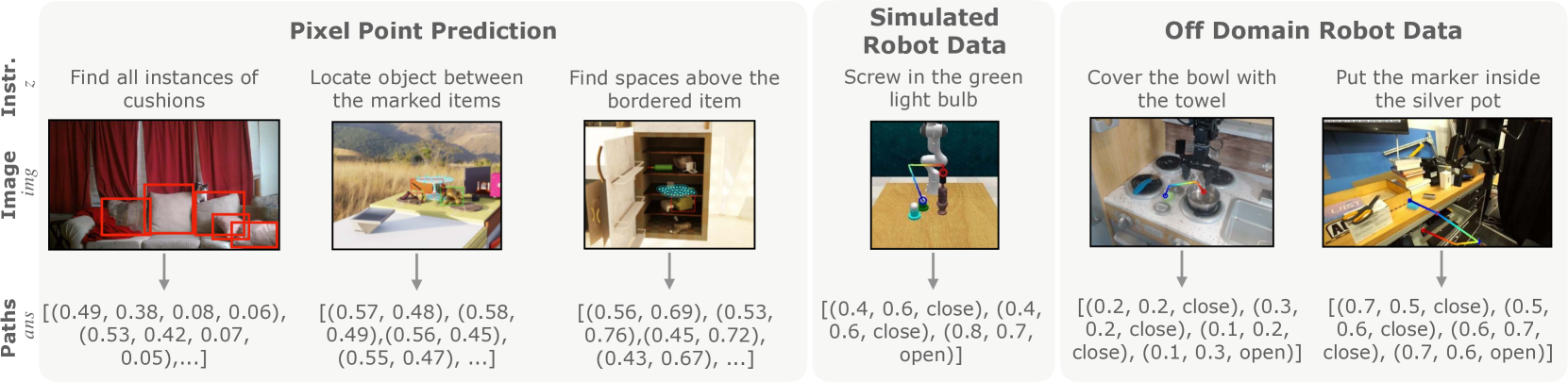
Off-domain 训练数据 (三类混合 + VQA 共训练):
| 数据源 | 规模 | 作用 |
|---|---|---|
| RoboPoint(点预测 VQA) | 770k | 教 VLM “what”:像素空间物体/空区定位 |
| RLBench sim(Franka, 81 tasks × ~1000 ep × ~4 语言) | ~320k | 教 VLM “what & how”,sim 数据 |
| Bridge (WidowX) + DROID | ~10k + ~45k → ~110k 2D paths | 教 VLM 在真实机器人场景下推理 |
| LLaVA-style VQA co-train | 660k | 保留 world knowledge |
关键点:
- 2D 路径从 proprio + camera intrinsics 前向投影得到——本质上把 robot 数据当成视频数据使用,不需要 action label(人手视频同理)。
- 用 Ramer-Douglas-Peucker 算法把上百点的原始轨迹稀疏化成几个关键点,让 VLM 在”高层”粒度推理。
- 所有数据统一为 VQA 格式,联合均匀采样微调;监督为标准 next-token 负对数似然。
Figure 3. 三类 off-domain 数据的输入/输出示例。
2.2 低层:Path-conditioned 3D Policy
策略形式 ,其中 是 proprio,, 语言指令, 是高层给出的 2D 路径。
架构候选:
- RVT-2([Goyal+ 2024]):Robot View Transformer,多视角虚拟相机。
- 3D Diffuser Actor (3D-DA)([Ke+ 2024]):diffusion 策略,输入 3D scene representation。
路径注入方式(两种):
- Overlay:把
(x_t, y_t)画成颜色渐变的折线直接叠在 RGB 图像上,gripper 变化用不同颜色圆圈标记。通用——任何 policy 架构都能吃。 - Concat:把 path 单独渲染一张 RGB 图,与原图拼成 6-channel。需要 policy 接受多通道,但性能更好(见 §3)。
训练:收集 ~320 条真机遥操 episode 作为 ;训练时用 oracle 2D 路径(proprio 投影)作为 ground truth path;推理时用 VLM 预测的路径。
推理频率:VLM 每 episode 只调 1-few 次;低层策略高频运行。对比 OpenVLA 7B 在 RTX 4090 上端到端 6Hz,这一设计让 VLM backbone 可以任意放大。
❓ “episode 开头单次推理” 对真正长程/动态场景显然不够——文中说 “one or few times”,具体重新触发 VLM 的条件没给定义。这应是 open problem。
3. Experiments
3.1 真机 Tabletop Manipulation(74 tasks, 222 evals)
Figure 4. 跨 7 条泛化轴的 success score(对比 OpenVLA / RVT-2 / 3D-DA)。
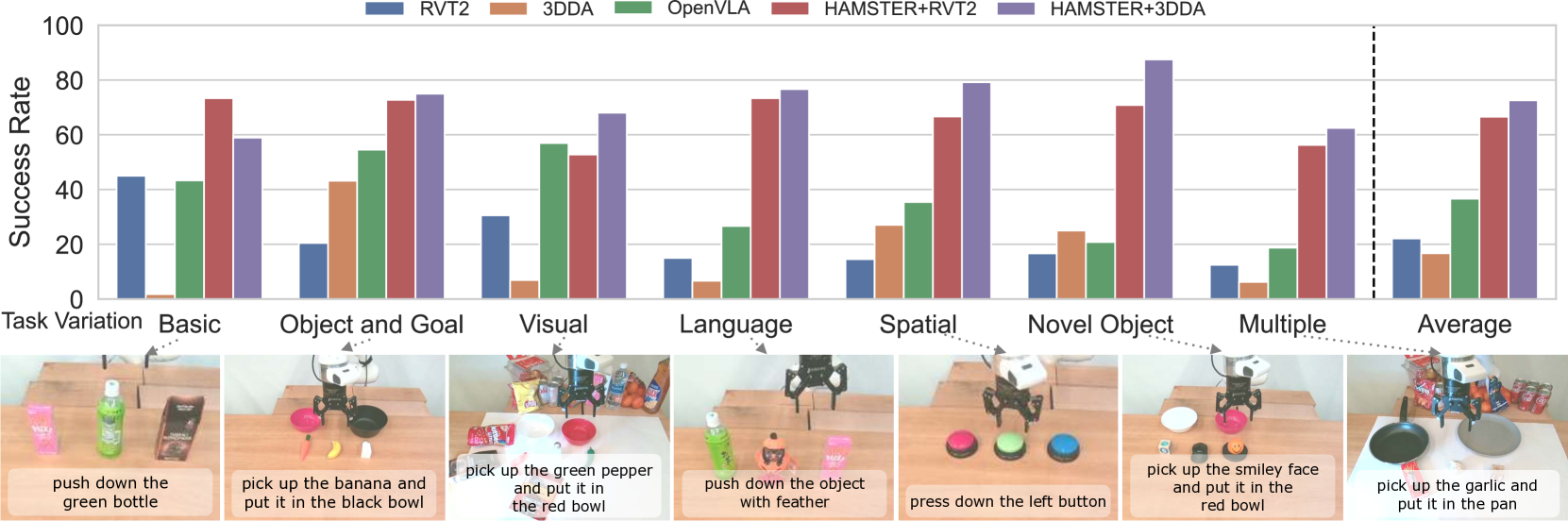
泛化轴:object/goal 组合、visual(纹理、灯光、distractor)、language(candy→sweet object)、spatial(位置关系)、novel object、multiple(组合)。
结论:
- HAMSTER 平均比 OpenVLA 高 ~2x,比非 VLM 的 3D policy baseline 高 ~3x。
- 跨 prehensile + non-prehensile(press button, knock down)都成立。
- 为公平起见,OpenVLA 也用 RLBench 做额外微调——几乎无提升(0.54 vs 0.58),说明 monolithic 架构难以从 sim 数据受益,而 HAMSTER 的 hierarchy 能。
Camera view invariance(Table 2):
| Method | Original Success / Complete | Novel Camera Success / Complete |
|---|---|---|
| OpenVLA | 0.60 / 0.30 | 0.23 / 0.00 |
| HAMSTER+RVT-2 (overlay) | 0.83 / 0.70 | 0.73 / 0.40 |
| HAMSTER+RVT-2 (concat) | 1.00 / 1.00 | 0.98 / 0.90 |
Concat 显著优于 overlay——文中归因:RVT-2 的虚拟视角投影会把叠加在 RGB 上的路径几何撕碎,独立通道保留完整路径信号。
3.2 Colosseum Simulation
Table 1: 在 5 tasks Colosseum 子集上,+3D-DA 用 50% 数据 就达到 vanilla 3D-DA 100% 数据 2x 的成功率,100% 数据 达到 2.4x——demonstration efficiency 由 path conditioning 带来。
Table 3(跨 15 种视觉变化轴 full Colosseum):
- 3D-DA 平均 0.35 ± 0.04
- HAMSTER+3D-DA 平均 0.46 ± 0.04(+31%) 在 background texture、manipulation object texture、table texture 等 visual-heavy 轴上提升最大;在 camera pos / manipulation obj size 这类几何轴提升有限——符合直觉:path 提供的主要是语义/视觉对齐信息。
3.3 VLM 本身的泛化
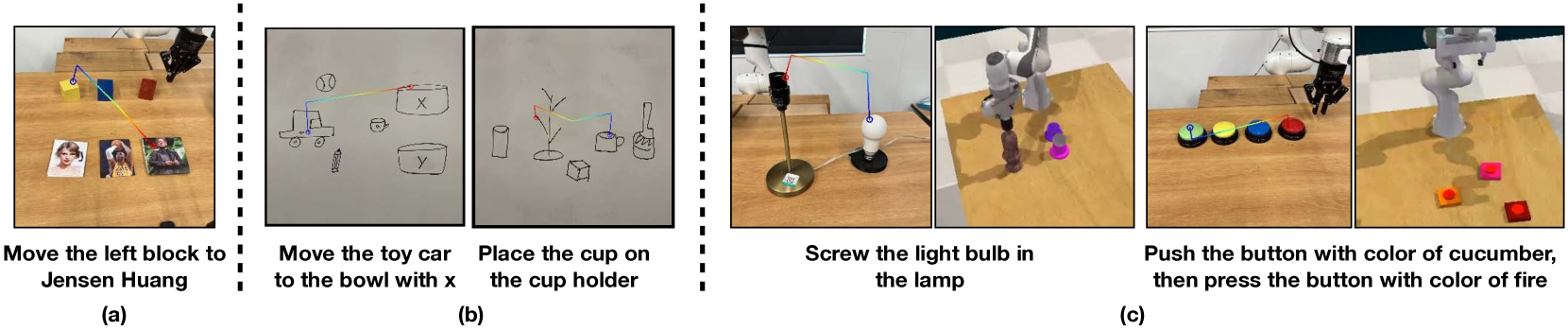
Figure 7. VLM 在未见场景下的 path 生成:world-knowledge 任务、手绘 sketch 输入、sim → real 迁移。
Appendix D.1 ablation(未嵌图):
- HAMSTER VLM 在 path 任务上显著优于 zero-shot prompting 闭源 VLM(对应 RT-Trajectory、Code-as-Policies 的设定)。
- 去掉 RLBench sim 数据 → 真机性能降,说明 sim 数据确实在 cross-domain transfer。
Table 4(VQA benchmark 保持):
| Method | VQA-v2 | GQA | VizWiz | POPE | MME | MMB | SEED | LLaVA-W | MM-Vet | MMMU |
|---|---|---|---|---|---|---|---|---|---|---|
| VILA-1.5-13B | 82.8 | 64.3 | 62.6 | 86.3 | 1569.6 | 74.9 | 65.1 | 80.8 | 44.3 | 37.9 |
| HAMSTER | 82.9 | 64.9 | 63.4 | 85.8 | 1588.4 | 75.3 | 64.2 | 81.2 | 44.4 | 37.8 |
结论:co-training 防住了 catastrophic forgetting,VLM 没退化成 narrow path-predictor。
4. Limitations(作者自述 + 我的观察)
作者:
- 只预测 2D 点,没有真实 3D 空间理解——VLM 不知道深度。
- 2D path 是窄带宽接口,无法传达力 / 旋转 / 接触模式。
我补充:
- 真机 training set 只有 320 条,所有”泛化”evals 实际上测的是同一个物理平台下的 visual/language 变化;跨 embodiment 泛化只在 VLM 那层被证明,低层 policy 仍然是 task-specific。
- “Episode 开头单次 VLM 推理”模型天然不适合动态/contact-rich 任务;论文没有 recovery 机制。
- Concat > overlay 的差距大(0.83 → 1.00)提示 overlay 这个”通用”接口其实是 HAMSTER 主推方式的次优实现;但 concat 不兼容 pretrained image encoder 的 3 通道输入,这是个真实的工程 trade-off。
关联工作
基于
- VILA-1.5-13B([Lin+ 2024]): 提供 interleaved image-text + video 预训练基座。
- RoboPoint([Yuan+ 2024b]): 770k 像素点预测 VQA 数据的直接来源;HAMSTER 显式感谢 Wentao Yuan 提供。
- RLBench([James+ 2020]): 81 任务模拟数据来源;用内置 planner 自动合成 320k 轨迹。
- Bridge + DROID: 真实机器人 off-domain 视频源。
- RVT-2 / 3D Diffuser Actor: 低层 3D policy 骨架。
- Ramer-Douglas-Peucker: 路径稀疏化算法。
对比
- OpenVLA: 核心 monolithic VLA baseline;HAMSTER 相对其提升 ~50%(7 轴平均 20pp)。
- RT-Trajectory(Gu+ 2023): 最直接的 prior——也用轨迹 sketch 条件化。HAMSTER 的 delta 是:(1) fine-tune VLM 生成轨迹而非 prompt;(2) 低层 policy 接受 3D 输入;(3) 论证 off-domain 数据能驱动 VLM 微调。
- RT-2 / π0: monolithic VLA 范式,共同竞争者。
- LLARVA: 也预测 end-effector trajectory,但只作 auxiliary task 给 monolithic 模型。
方法相关
- MOKA(Liu+ 2024b): mark-based visual prompting + 固定数量 waypoint 预测——关键点而非完整路径。
- RoboPoint / PIVOT / VoxPoser: 用 VLM 预测 keypoint affordance 或 value map 作为 policy 接口。HAMSTER 的论点:轨迹比点集表达能力更强。
- Track-any-point policies(Track2Act、ATM、Gen2Act): 基于 object trajectory 条件化,与 HAMSTER 的 end-effector trajectory 是对偶选择;文中提到该框架可自然扩展到 object trajectory。
- Hi Robot / MoManipVLA: 其他 hierarchical VLA 工作;HAMSTER 的独特切分是”2D path 作为语言之外的显式几何接口”。
- ECoT: 也在 VLA 里插入中间表示(CoT + bounding box + gripper pos),但用于监督 action prediction 而非作为 policy 输入。
论文点评
Strengths
- 问题选得漂亮: “monolithic VLA 被 on-robot 数据量卡死”是真痛点;“找一个便宜可得、embodiment-agnostic 的中间表征” 是 first-principles 的问题重构。
- Off-domain 数据配方具体可复制: RoboPoint + RLBench + Bridge/DROID + VQA co-train 的比例给得明确;选择 VILA-1.5-13B 也有理由(interleaved + video caption 预训练让它对 path-in-image 任务有 inductive bias)。
- 关键 ablation 都做了: RLBench vs no-RLBench、overlay vs concat、50% data、camera view 变化、VQA 保持,分别对应 off-domain 有用性 / 路径注入方式 / 数据效率 / 几何泛化 / catastrophic forgetting。
- 生成数据的自动化: 2D path 监督从 proprio 投影得到,不需要额外人标;这是方法能 scale 的前提。
- 跨非抓取任务的可迁移性: press button / knock down / unfold towel / open drawer 都验证了,不是 pick-place only。
Weaknesses
- “Once per episode” 推理假设被低调处理: long-horizon 多子任务场景下 VLM 显然要多次调用,但触发机制、error recovery、replanning 都没讨论。Figure 8 的 long-horizon rollout 更像是人工拼接。
- 2D path 的信息瓶颈已在 Colosseum 的几何轴上显形: camera pos / manip obj size 轴提升有限,作者没诚实讨论这是”因为 2D 表征天然不编码深度”的结构问题。
- 低层仍需 task-specific demo: 320 条真机 data,新任务仍然要重新收。文中 framing 让人误以为 off-domain data 解决了所有问题,但其实只解决了 VLM 那层;“data efficiency” 是相对 3D-DA 的 2x,不是绝对意义上的 zero-shot。
- Cross-embodiment 的 claim 被夸大: VLM 层见过 WidowX(Bridge)数据,但下游 policy 仍然 specific to测试机器人(Franka?未明确)。所谓”embodiment-agnostic 的 2D path”主要是从 pretraining 角度。
- Repo 状态 beta 且停滞:
liyi14/HAMSTER_beta,pushed 369 天前,90 天 0 commits,issues 未关——这对一篇 ICLR 被接收的工作不太合适,复现成本高。作者 claim “fully open-sourced enabler”与 repo 现状有落差。 - Baseline 公平性存疑: OpenVLA 用的是原版 7B,HAMSTER 用 13B VILA;对比的 FLOPs / 参数量没 align。
可信评估
Artifact 可获取性
- 代码: inference + training(Gradio demo server + training scripts based on VILA 仓库),但 repo 标 beta 且长期未更新。
- 模型权重: HuggingFace 上有 VLM checkpoint(README 提到),具体名称未列出。
- 训练细节: 仅高层描述——数据规模、VLM base model、共训练比例给了;具体超参、学习率、训练步数、compute 在 Appendix B(未完全阅读)。
- 数据集: RoboPoint / RLBench / Bridge / DROID 均公开,320 条真机 demo 未公开。
Claim 可验证性
- ✅ “20% avg improvement over OpenVLA across 7 axes”:74 tasks × 3 trials ×多 baseline 的实验规模明确,Table 5 (appendix) 给了 per-task 分数,可核验。
- ✅ “hierarchical VLM benefits from off-domain data”:RLBench ablation(加 vs 不加)给了真机对比数据,OpenVLA 同 RLBench 微调对照也控制住了。
- ⚠️ “demonstration efficient (2x with 50% data)“:只在 Colosseum 5 任务子集上验证;5 任务 + 5 seeds 统计力有限,置信区间给出但未报告 p-value。
- ⚠️ “strong cross-embodiment generalization”:VLM 训练数据包含异构机器人视频,但 eval 仍然 Franka;claim 的是 VLM 可以跨,不是完整系统跨。
- ⚠️ “can scale VLM to any size due to async inference”:每 episode 单次推理的假设未充分验证在 dynamic 任务上是否成立。
- ❌ 无明显 marketing 话术。
Notes
- 与 2503-MoManipVLA、2502-HiRobot 的关系值得展开: 三者都是 hierarchical VLA 的当下范式;HAMSTER 选 2D path,MoManipVLA 选 waypoint + base trajectory,HiRobot 选 language subgoal。信息带宽、可监督性、robustness 三个维度各有优劣。
- 2D path vs object-centric flow: Gen2Act、Track2Act 用 object trajectory;这对 articulated / deformable 场景可能更鲁棒。值得对比:end-effector 轨迹 vs object 轨迹 vs 二者都要,哪个是更 general 的接口?
- Concat > overlay 的 finding 是 methodologically 有趣的小发现: 它暗示当前的 path-conditioning 可能都被 overlay 的碎片化损伤;未来做 VLA benchmark 评估 path-based 方法时应控制这一变量。
- 为什么选 2D 而不是深度图/3D 路径?: 作者没正面回答。推测是”2D 能从 monocular 视频/sim 无缝提取、3D 会把 off-domain 数据池缩小”——这是 accept bandwidth loss 换 data coverage 的理性选择。
Rating
Metrics (as of 2026-04-22): citation=96, influential=3 (3.1%), velocity=6.67/mo; HF upvotes=0; github 59⭐ / forks=7 / 90d commits=0 / pushed 369d ago · stale
分数: 2 - Frontier
理由: citation 96 + velocity 6.67/mo(14 个月)表明该工作在 hierarchical VLA / path-conditioned policy 这条线上被广泛引用和讨论,是当前 frontier 的代表之一;但 influential/total 仅 3.1%(远低于典型 10%)说明它更多被当作 landmark reference 而非技术被实质继承——这与 2D path 接口偏窄、下游需要 task-specific demo 的局限相吻合。Repo is_stale、HF upvotes=0 也说明社区未把它作为可直接用的开源基座。综上不达 Foundation 档(对比 OpenVLA、π0 这类真正定义范式的工作),但明显高于 Archived 档——后续研究 hierarchical VLA 或 2D path conditioning 时必须引用与对比。