Summary
NavGPT: Explicit Reasoning in Vision-and-Language Navigation with Large Language Models
- 核心: 用纯 LLM (GPT-4 / GPT-3.5) 做 zero-shot R2R 导航 agent,将视觉观测转成自然语言、用 ReAct 风格的 Thought+Action 循环显式输出推理过程
- 方法: BLIP-2 caption + Faster-RCNN object detection + Matterport3D depth → prompt manager 拼装;GPT-3.5 summarizer 压缩历史;ReAct 推理后选下一个 viewpoint
- 结果: R2R val-unseen SR 34% / SPL 29%,远低于 supervised SOTA (DuET 72%),但远好于无训练 baseline DuET-LXMERT (SR 1%)
- Sources: paper | github
- Rating: 2 - Frontier(LLM-as-VLN-agent 早期可行性证明,AAAI 2024 + 后续 NavGPT-2 延续,但 caption-based pipeline 已被 multi-modal LLM 路线取代,属于方向前沿的”转折点”工作而非 building block)
Key Takeaways:
- Zero-shot LLM agent for VLN 是可行的: 纯文本输入 + ReAct 循环就能在 R2R 拿到 SR=34,证明 LLM 内在的 commonsense 与高层规划能力可以直接用于 embodied 导航
- 可解释的高层规划: GPT-4 的 thought trace 显式展现 sub-goal decomposition, landmark identification, progress tracking, exception handling 五种行为,是 supervised 模型不具备的”白盒”特性
- Spatial / historical awareness emergent: 仅给文本动作描述,GPT-4 能用 pyplot 画出近似的 top-down trajectory;也能从历史 action+observation 反向生成 R2R 风格 instruction
- 瓶颈在 vision→text 的信息损失: BLIP-2 caption 的粒度限制 + history summarizer 的压缩损失,是与 supervised 模型差距的主因;作者指出未来应做多模态 LLM 而非 caption-based pipeline
Teaser. NavGPT 的整体架构:LLM 通过 prompt manager 接收 VFM 的视觉描述、history buffer (含 GPT-3.5 summarizer)、navigation system principle,输出 Thought+Action。

任务设定与动机
VLN 给定自然语言指令 ,agent 在每一步从 simulator 获取 panorama observation 并从可达 viewpoint 中选下一步。Agent 状态 包含 viewpoint、heading、elevation。Policy 通常需要从 VLN 数据集训练 。
NavGPT 的关键 deviation: 不从 VLN 数据训练,而完全来自 LLM 预训练语料。文章想回答的问题是:LLM 能否仅通过文字理解 interactive world、actions and consequences,从而解 navigation 问题?
❓ 这个 framing 把 VLN 当成一个 “LLM reasoning probe”,而非追求 SOTA。这跟 SayCan / PaLM-E 的实用 framing 不同——前者把 LLM 当 planner 配合 affordance,后者直接做 multimodal 训练。NavGPT 走的是 “LLM-as-only-policy + VFM-as-translator” 的极简路线。
方法
系统组件
NavGPT 把决策分解为 4 个抽象组件,prompt manager 把它们都翻译成纯文本喂给 LLM:
- Navigation System Principle : 写死的 system prompt,定义 VLN 任务、reasoning format、规则(如 viewpoint ID 不能编造)
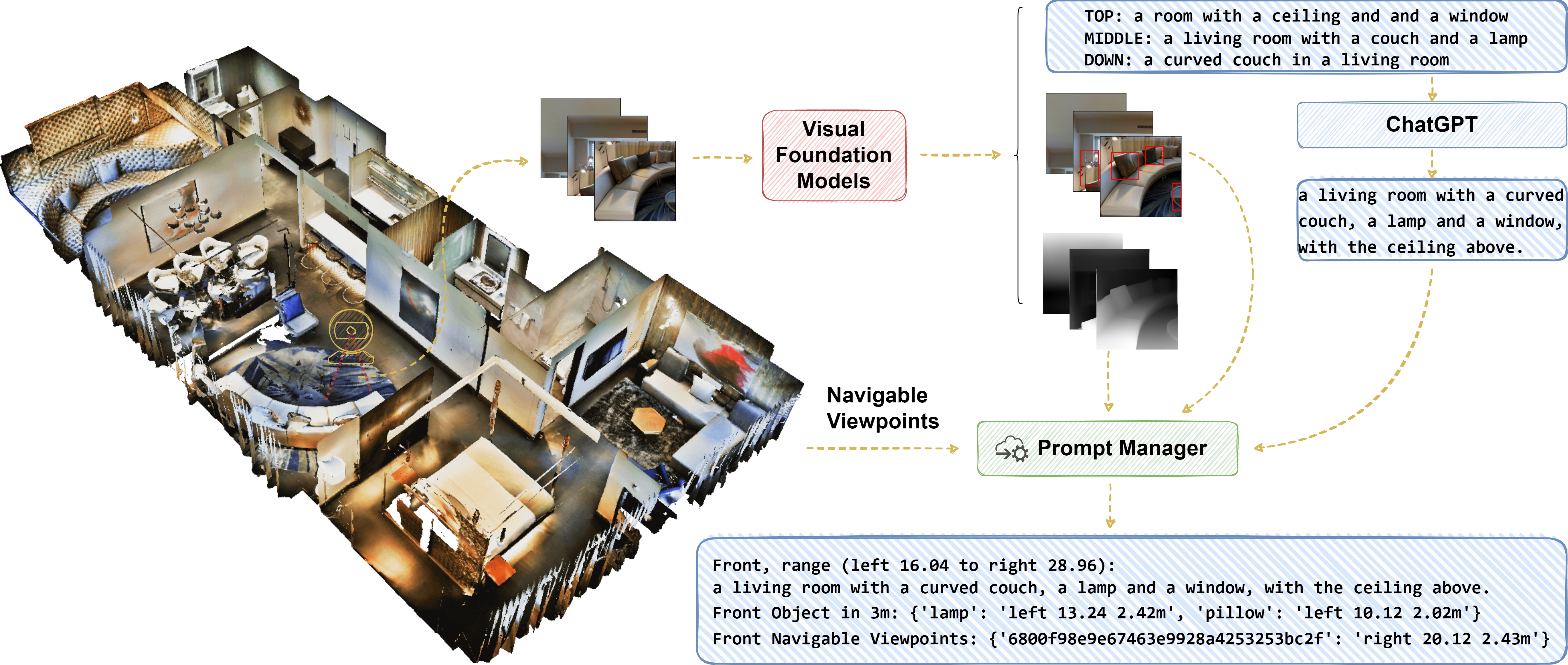
- Visual Foundation Models : BLIP-2 (caption) + Faster-RCNN (object box) + Matterport3D (depth),把图像翻译成 “object class + 相对 heading + 相对距离” 的文字描述
- Navigation History : 三元组序列 ,其中早期 observation 由 GPT-3.5 summarizer 压成一句话
- Prompt Manager : 把 4 类信息按当前 heading 为 “front” 顺时针拼成一个 prompt
Visual Perceptron
每个 viewpoint 取 8 个 heading(0°/45°/…/315°)× 3 个 elevation(-30°/0°/+30°)= 24 个 egocentric view,每个 FoV=45°。BLIP-2 用 prompt “This is a scene of” 给每张图生成 caption,再用 GPT-3.5 把同 heading 的 top/middle/down 三张 caption summarize 成一句话。
Faster-RCNN 检测物体,从 Matterport3D 取 bbox 中心像素的 depth;只保留 3m 内的物体,附带相对 heading。
Figure 2. 视觉到文字的转换流程:从一个 viewpoint 的 8 个 direction 中取一个 direction 演示。
ReAct 风格的 Thought + Action
借用 ReAct 的扩展动作空间 , 是任意自然语言。Thought 不与环境交互,但被注入到 history 里供后续步骤复用。两个声称的好处:
- 思考再选择动作 → 复杂规划(sub-goal、landmark matching)
- Thought 进 history → 长程一致性 + plan adjustment
History 压缩
完整 history 太长会爆 context。用 GPT-3.5 summarize 每个旧 viewpoint 的 observation 为一句话,模板:
Given the description of a viewpoint. Summarize the scene from the viewpoint
in one concise sentence.
Description: {description}
Summarization: The scene from the viewpoint is a
当前 viewpoint 用完整描述,旧 viewpoint 用 summary——这是性能 vs. context length 的折中。
实验
Setup
- 数据集: R2R val-unseen split,783 trajectory,11 个 unseen indoor scene
- VFMs: BLIP-2 ViT-G FlanT5-XL + Faster-RCNN
- 指标: TL(轨迹长度)/ NE(导航误差)/ OSR / SR / SPL
与 supervised baseline 的对比
Table 1. R2R val-unseen 上 NavGPT 与 supervised 方法对比
| Training Schema | Method | TL | NE↓ | OSR↑ | SR↑ | SPL↑ |
|---|---|---|---|---|---|---|
| Train Only | Seq2Seq | 8.39 | 7.81 | 28 | 21 | - |
| Train Only | Speaker Follower | - | 6.62 | 45 | 35 | - |
| Train Only | EnvDrop | 10.70 | 5.22 | - | 52 | 48 |
| Pretrain+Finetune | PREVALENT | 10.19 | 4.71 | - | 58 | 53 |
| Pretrain+Finetune | VLN-BERT | 12.01 | 3.93 | 69 | 63 | 57 |
| Pretrain+Finetune | HAMT | 11.46 | 2.29 | 73 | 66 | 61 |
| Pretrain+Finetune | DuET | 13.94 | 3.31 | 81 | 72 | 60 |
| No Train | DuET (Init. LXMERT) | 22.03 | 9.74 | 7 | 1 | 0 |
| No Train | NavGPT (Ours) | 11.45 | 6.46 | 42 | 34 | 29 |
NavGPT 离 supervised SOTA 还有 ~38 个 SR 点的 gap,但相比未训练的 LXMERT-init DuET 已是质变(SR 1 → 34)。作者归因为两点:(a) 视觉到语言的描述精度不够;(b) 物体 tracking 能力弱。
视觉组件 ablation
由于 budget 限制,ablation 全部用 GPT-3.5(性能上限低)。从 train + val unseen 共 72 个 scene 各采样 1 个 trajectory × 3 instructions = 216 样本。
Table 2. 视觉描述粒度的影响
| Granularity | # | TL | NE↓ | OSR↑ | SR↑ | SPL↑ |
|---|---|---|---|---|---|---|
| FoV@60, 12 views | 1 | 12.38 | 9.07 | 14.35 | 10.19 | 6.52 |
| FoV@30, 36 views | 2 | 12.67 | 8.92 | 15.28 | 13.89 | 9.12 |
| FoV@45, 24 views | 3 | 12.18 | 8.02 | 26.39 | 16.67 | 13.00 |
FoV 太大→BLIP-2 倾向于描述房间类型,丢物体细节;FoV 太小→无法识别完整物体。FoV=45 是 sweet spot。
Table 3. 物体检测和 depth 信息的增益
| Agent Observation | # | TL | NE↓ | OSR↑ | SR↑ | SPL↑ |
|---|---|---|---|---|---|---|
| Baseline (caption only) | 1 | 16.11 | 9.83 | 15.28 | 11.11 | 6.92 |
| Baseline + Obj | 2 | 11.07 | 8.88 | 23.34 | 15.97 | 11.71 |
| Baseline + Obj + Dis | 3 | 12.18 | 8.02 | 26.39 | 16.67 | 13.00 |
物体 detection 把 SR 从 11 提到 16(+4.86),depth 再加 0.7。作者观察到一个具体 failure mode:agent 不知道离目标多远,看到目标就立刻停 → depth 缓解了这个问题。
Qualitative:高层规划
Figure 3. NavGPT 的 reasoning trace 展示:sub-goal decomposition、commonsense reasoning、landmark identification、progress tracking、exception handling 五种行为都能被 GPT-4 显式输出。
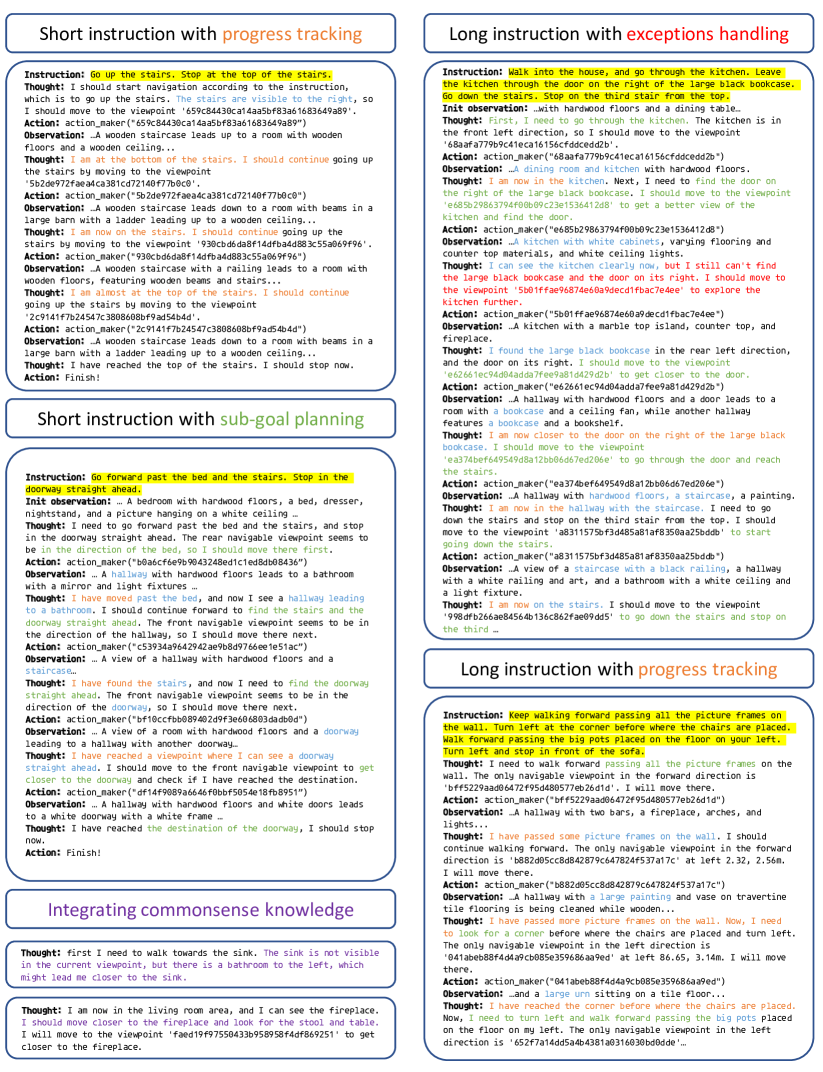
Figure 4. Spatial / historical awareness probe:仅给 GPT-4 历史 action+observation(剔除 reasoning 防止信息泄漏),它能(a) 反向生成符合 R2R 风格的 instruction,(b) 用 pyplot 画出近似的 top-down trajectory。

❓ Trajectory drawing 看起来很惊艳,但这是 1 个 cherry-picked 成功 case,没有量化评估(如 trajectory IoU、平均位置误差)。GPT-4 真的能可靠地维护 metric spatial map,还是只在简单短轨迹上 work?这是 claim 与 evidence 的 gap。
Failure modes
两类典型失败:
- 目标物体不在 caption 中:BLIP-2 没描述到 instruction 提到的物体 → agent 被迫盲目探索
- History summary 丢细节:把 viewpoint 压成一句话后,agent 无法判断 “我有没有 turn right into the next room”,错误地以为已经完成
作者建议方向:动态生成视觉描述(类似 ChatCaptioner 的 LLM-VFM 多轮交互),避免一次性 static caption 的信息瓶颈。
关联工作
基于
- ReAct (Yao et al. 2022): NavGPT 直接借用 Thought+Action 的扩展动作空间形式
- BLIP-2 (Li et al. 2023): 视觉描述的 caption backbone
- R2R (Anderson et al. 2018): VLN 任务和评测协议来源
- Matterport3D Simulator: 提供离散 navigation graph 和 depth
对比
- SayCan: 同样是 LLM + embodied,但 SayCan 是 LLM 做 high-level planning + low-level skills with affordance score;NavGPT 是 LLM 直接做 step-level decision
- PaLM-E: 多模态 LLM 路线(与 NavGPT 的 caption-based 路线对立);NavGPT 在结论里实际上承认 PaLM-E 这条路更有前途
- DuET / HAMT: supervised SOTA,作为性能上界对比
- DuET (Init. LXMERT): 唯一的 “no train” baseline,但是为 supervised 设计的模型,对比不对称
方法相关
- CLIP-based zero-shot VLN (Dorbala et al.): 另一种 zero-shot VLN 路线,依赖 text-image matching 而非 LLM reasoning
- Topological maps for VLN: NavGPT 没有显式 map 结构,完全靠 LLM 的 history+spatial awareness
- ChatCaptioner: 作者建议未来用 LLM-VFM 多轮交互替代 static caption,是一个明确的 follow-up 方向
后续工作
- NavGPT-2 (ECCV 2024): 同作者的后续,转向 multi-modal LLM,呼应本文 “future direction” 的判断
- NaVid / NaVILA / VLN-R1: 接棒的 video / multi-modal LLM 路线,验证了 caption-based pipeline 是 dead end 的判断
论文点评
Strengths
- Framing 清晰且有 conceptual value:把 LLM 当成”零训练 VLN policy”是一次干净的 probe,让我们看到 GPT-4 在 embodied 任务上能涌现哪些能力(高层规划、spatial awareness、progress tracking)——这些在 supervised black-box VLN model 里是看不到的
- Reasoning trace 的可解释性是真材实料:Figure 3 中 sub-goal decomposition、exception handling 是 supervised model 几乎不可能给出的,对 VLN agent 的 debug 和 error attribution 有方法论价值
- Ablation 抓住关键 trade-off:FoV granularity 和 caption vs. obj+depth 两个 ablation 直接指向了 caption-based pipeline 的核心瓶颈,对后续工作(如 NavGPT-2 转向 multi-modal LLM)有清晰的 motivation
Weaknesses
- 绝对性能与 supervised 模型差距巨大:SR 34 vs. DuET 72,作为方法论 contribution 可以接受,但作为 “LLM-as-VLN-agent” 的可行性证明,这个 gap 表明 caption-based pipeline 不是正确路径
- Spatial awareness claim 缺乏量化:Figure 4 的 top-down trajectory drawing 只是一个 cherry-picked case,没有任何系统性的几何精度评估,难以判断这是 reliable capability 还是 memorization artifact
- Ablation 仅在 GPT-3.5 上做:所有 ablation 用 GPT-3.5(SR 上限远低于 GPT-4),主结果用 GPT-4——读者无法判断 visual component 的贡献是否在 GPT-4 上同样成立,可能存在 LLM capability × visual quality 的非线性交互
- 依赖 oracle navigation graph:NavGPT 选 viewpoint 的离散动作空间来自 R2R 的预定义图,不是真实场景的 continuous navigation;这意味着方法不能直接迁移到 free-space VLN,limitation 没充分讨论
- History summarizer 的损失没量化:GPT-3.5 summarizer 是性能瓶颈之一,但论文没做 “no summarizer / full history” baseline(哪怕在短轨迹上)来量化这一损失
可信评估
Artifact 可获取性
- 代码: inference-only(GitHub 提供 NavGPT.py 推理脚本,因为方法本身就 zero-shot 无训练)
- 模型权重: 用 OpenAI 的 GPT-4 / GPT-3.5(闭源 API)+ BLIP-2 ViT-G FlanT5-XL(开源)+ Faster-RCNN(开源);无新训练权重
- 训练细节: N/A(zero-shot 方法),但 prompt 模板和 BLIP-2 prompt 选择有完整披露(Appendix A)
- 数据集: R2R 公开(README 提供 Dropbox 下载链接),val-unseen split 783 trajectories
Claim 可验证性
- ✅ R2R val-unseen 上 NavGPT (GPT-4) SR=34 / SPL=29:标准 R2R 评估流程,代码 + 数据 + API 全可复现,唯一的 reproducibility 风险是 OpenAI API 版本漂移
- ✅ VFM 组件 ablation (FoV / obj / depth) 的相对收益:在 216 样本子集上做的,方差可能不小,但方向性结论可信
- ⚠️ GPT-4 能”显式 sub-goal decomposition / landmark identification / exception handling”:基于 cherry-picked qualitative case,无量化频率(多少 % 的 trajectory 出现哪种行为),且这些”能力”是 prompt-induced 还是 emergent 难以区分
- ⚠️ GPT-4 能画出准确的 top-down trajectory:单 case 演示,无系统精度评估;“awareness of spatial relations” 的 claim 强于 evidence
- ⚠️ NavGPT 表现”远好于”无训练 baseline:唯一对比是 DuET-LXMERT (SR 1),这是一个为 supervised 训练设计的模型直接 zero-shot——比较是不对称的,更公平的 baseline 应是其他 LLM-based zero-shot 方法(如 CLIP-based zero-shot VLN)
Notes
- 历史定位:这是 LLM 时代第一波”把 ChatGPT 当 VLN agent”的工作之一(2023.05),与 SayCan (2022) / PaLM-E (2023) 共同定义了”LLM for embodied navigation”的早期 design space。NavGPT 选了最极端的 LLM-only + caption pipeline,作为可行性证明,但论文自己也意识到这条路的天花板低
- 方向上的 lesson:caption→LLM 是 VLN 的 dead end(信息瓶颈不可逾越)。后续的 NaVid / NaVILA / VLN-R1 等都走 video / multi-modal LLM 路线,验证了这个判断
- prompt-engineering 的工程价值:Appendix 里 BLIP-2 prompt 选择 (“This is a scene of” vs. “Detailly describe the scene”) 的对比是个有意思的细节——caption-based pipeline 中,prompt 选择直接决定上层 LLM 能否拿到正确的 grounding 信息
- 可借鉴的 component:history summarizer 的设计(旧 viewpoint 一句话,当前 viewpoint 完整描述)是处理长 context VLN 的简单 baseline,但其信息损失是已知 weakness——值得一个量化的 ablation
- 对 spatial intelligence 的启示:Figure 4 那个 GPT-4 画 trajectory 的实验,虽然 cherry-picked,但提示了一个有意思的问题:LLM 能否仅从语言形式的 action sequence 维护 metric spatial state?这与 CoT degrades spatial 的发现可能有联系——LLM 的 spatial reasoning 是脆弱的,cherry-picked case 难以反映真实分布
Rating
Metrics (as of 2026-04-24): citation=353, influential=30 (8.5%), velocity=10.09/mo; HF upvotes=0; github 336⭐ / forks=33 / 90d commits=0 / pushed 899d ago · stale
分数:2 - Frontier
理由:AAAI 2024 录用 + 同作者 NavGPT-2 延续,且作为”LLM-only + caption pipeline 做 VLN”的代表工作,后续 NaVid / NaVILA / VLN-R1 都把它作为 LLM-for-VLN 早期 baseline 引用——符合 Frontier 档的”方法范式代表工作”定义。没有升 3 是因为 Weakness 里写到的 caption-based pipeline 已被证明是 dead end,社区转向 multi-modal LLM 路线,NavGPT 不是这条活路的 building block;没有降 1 是因为它在 LLM-for-VLN 的 design space 讨论里仍是绕不开的”转折点”参考。