Summary
IRASim: A Fine-Grained World Model for Robot Manipulation
- 核心: 训练一个 trajectory-to-video 的 diffusion transformer 作为 fine-grained robot manipulation world model,要求每一帧画面与 trajectory 中对应 timestep 的 action 严格对齐。
- 方法: 在 DiT block 内引入 frame-level action conditioning——把每个 action 单独编码成 embedding,分别 modulate 对应 frame 的 spatial-attention LayerNorm 的 scale/shift 参数;temporal block 用 video-level shared embedding。VAE latent 空间扩散,autoregressive rollout 出长视频。
- 结果: RT-1/Bridge/Language-Table/RoboNet 上 latent L2 与 PSNR 全面优于 LVDM/VDM/iVideoGPT/MaskViT;与 LIBERO ground-truth simulator 在 policy success rate 上 Pearson 0.99;用作 ranking-based planner 把 Push-T 上 vanilla diffusion policy IoU 从 0.637 拉到 0.961。
- Sources: paper | website | github
- Rating: 2 - Frontier(ICCV 2025 被接收、bytedance 开源、被 WMPO 等后续工作作为 baseline/reference;frame-level action conditioning 是 trajectory-to-video 方向的代表设计,但尚未成为方向 de facto 基础)
Key Takeaways:
- Frame-level action conditioning:把 trajectory 当成 frame-wise 信号(而非 video-level 的 single embedding)注入 DiT 的 AdaLN,是把通用 text-to-video DiT 改造成精确 action-conditioned world model 的最小且关键的改动。
- World model 的两个独立用途同时验证:(a) policy evaluation——与 ground-truth simulator 评估结果 Pearson 0.99;(b) model-based planning——配合 reward / goal-image 做 trajectory ranking,IoU 0.637 → 0.961。
- Test-time scaling for manipulation:sampled trajectory 数 K↑、post-trained rollouts 数 P↑ 都能稳定推动 policy performance,把 inference-time compute 投入显式拉到 manipulation 这个之前几乎没人讨论的领域。
- Action chunking 友好:与现代 diffusion policy 输出 trajectory 而非 single action 的范式天然匹配——一次 forward 出整个 chunk 对应的视频。
Teaser. IRASim 概览:以 1 张历史 observation + 一段 action trajectory 为条件,生成 fine-grained 模拟 robot-object 交互的视频。

1. Problem & Motivation
Trajectory-to-video task 的形式化:
- :历史帧数;:trajectory 长度;,机械臂典型 (3 平移 + 3 旋转 + 1 gripper)。
- 与 text-to-video 的关键区别:text 是 video-level 的粗描述,trajectory 是 frame-level 的精确指令——每个 action 严格对应一帧画面里的机器人位姿。沿用 text-to-video 的 single-embedding conditioning 会丢掉这种 per-frame correspondence。
作者的 framing 抓得很准:trajectory-to-video 不是 text-to-video 的子集,而是一类 conditioning 粒度根本不同的新问题。如果你把 trajectory pool 成一个 embedding 喂给 DiT,模型只能”知道这段视频大致要往哪走”,做不到”第 7 帧 gripper 应该闭合到 0.3”。
2. Method
Figure 2. IRASim 网络架构。(a) 总体 DiT 结构;(b) Video-Ada(trajectory pool 成单 embedding);(c) Frame-Ada(每个 action 独立 embedding,frame-wise modulate spatial block)。

2.1 Backbone:latent-space DiT + spatial-temporal attention
- VAE:直接复用 SDXL 预训练的 VAE encoder/decoder,全程冻结。每帧 被压到 latent ,diffusion 在 latent 空间进行——降低长视频高分辨率的算力开销。
- Backbone:DiT blocks,但用 spatial-temporal factorized attention(spatial block 内做 frame-internal attention,temporal block 内做 cross-frame attention),把 token 数从 降到 。
- Historical frame conditioning:把 作为 ground-truth 段拼到输入序列前,训练时只对 加噪、只在预测帧上算 diffusion loss——通过 attention 自动让预测帧”看到”历史帧,保证视觉一致性。
2.2 Trajectory conditioning:Video-Ada vs Frame-Ada
两种把 action trajectory 注入 DiT 的方式(论文核心 ablation):
Video-Ada(baseline 思路):trajectory 经一个 linear 编成单一 embedding,加到 diffusion timestep embedding 上得到 ,再回归 spatial / temporal block 共用的 (AdaLN 参数)。
Frame-Ada(本文核心):每个 action 单独经 linear 编 embedding,加 timestep embedding 得到 frame-specific 。spatial block 对第 帧用专属的 ;temporal block 仍用 video-level 共享 embedding 。
这个 design 很直观也很优雅:spatial block 处理”这一帧机器人长什么样”——必须 frame-specific;temporal block 处理”帧间如何过渡”——共享一个全局 trajectory embedding 足矣。等于把 conditioning 的粒度和 attention 的粒度对齐。
2.3 长视频:autoregressive rollout
短轨迹(≤ 步)一次 forward 出完;长轨迹则把上一段最后一帧作为下一段的 historical condition,autoregressive 生成。RT-1 平均 42.5 帧、Bridge 33.4、Language-Table 23.7。
3. Experiments
3.1 Trajectory-conditioned video prediction
数据集:RT-1(7-DoF, 256×320)、Bridge(7-DoF, 256×320)、Language-Table(2-DoF, 288×512)、RoboNet(5-DoF unified, 256×256)。短轨迹 1 帧历史 + 15 actions → 预测 15 帧。
Baselines:VDM(pixel-space U-Net diffusion)、LVDM(latent-space U-Net diffusion)、iVideoGPT(autoregressive token transformer)、MaskViT(iterative token refinement)。
Table 1. 短轨迹 quantitative results(节选)。Latent L2 与 PSNR 是论文主指标——trajectory-to-video 是 reconstruction 任务,分布距离类指标 (FID/FVD) 反而和 human preference 不一致。
| Dataset | Method | PSNR ↑ | SSIM ↑ | Latent L2 ↓ |
|---|---|---|---|---|
| RT-1 | VDM | 13.762 | 0.554 | 0.4983 |
| RT-1 | LVDM | 25.041 | 0.815 | 0.2244 |
| RT-1 | Video-Ada | 25.446 | 0.823 | 0.2191 |
| RT-1 | Frame-Ada (Ours) | 26.048 | 0.833 | 0.2099 |
| Bridge | LVDM | 23.546 | 0.810 | 0.2155 |
| Bridge | Frame-Ada (Ours) | 25.275 | 0.833 | 0.1947 |
| Language Table | LVDM | 28.254 | 0.889 | 0.1704 |
| Language Table | Frame-Ada (Ours) | 28.818 | 0.888 | 0.1660 |
Table 2. RoboNet 上对 token-based baselines 的对比。IRASim 用 SDXL VAE 直接训,不需要在 RoboNet 上 finetune VQGAN(iVideoGPT 与 MaskViT 都需要)。
| Method | PSNR ↑ | SSIM ↑ |
|---|---|---|
| MaskViT | 20.4 | 67.1 |
| iVideoGPT | 23.8 | 80.8 |
| IRASim (Ours) | 24.6 | 81.1 |
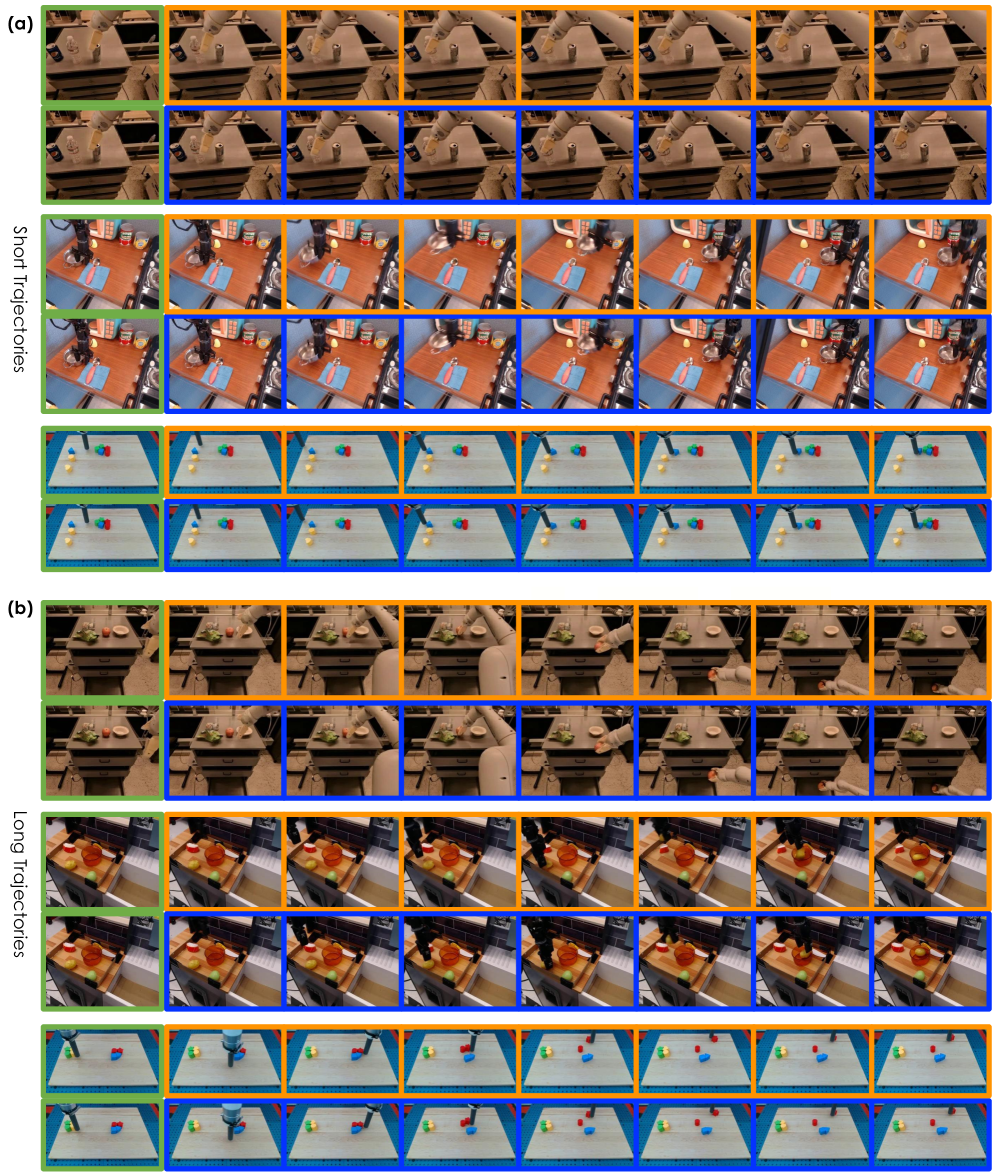
Figure 3. 短/长轨迹定性结果:predictions(橙框)与 ground truth(蓝框)在三个数据集上对比。
Scaling:33M → 679M,三个 dataset 上 latent L2 与 PSNR 都随 model size、训练步数单调改善。

❓ Frame-Ada 相对 Video-Ada 的 gap 在 PSNR / Latent L2 上其实不大(RT-1 PSNR 26.048 vs 25.446),主要差异在 long trajectory 与 human preference。是不是说 frame-level alignment 的好处主要体现在 long-horizon 一致性,而非 single-clip 重建?长轨迹时 LVDM 在 Language-Table PSNR 26.215,Frame-Ada 26.773 也并非碾压,这部分差距能否归因于 frame-level conditioning 而非其他设计差异,论文 ablation 不够干净。
Video clips(来自 project page):
Video 1. RT-1 短轨迹预测
Video 2. Bridge 长轨迹预测
3.2 Policy evaluation:与 ground-truth simulator 对齐
LIBERO benchmark 上训 4 个不同 step 的 diffusion policy,分别在 Mujoco(GT)和 IRASim 中 rollout 50 次评估。IRASim 用 expert demos + post-trained rollouts(含成功 / 失败)训练,初始化自 OpenSora。
Table 4. 四个 policy model 的 success rate。Pearson 相关系数 0.99——IRASim 作为 evaluator 与 GT simulator 高度一致。
| Evaluator | Model 1 | Model 2 | Model 3 | Model 4 |
|---|---|---|---|---|
| Ground-Truth Simulator | 0.18 | 0.50 | 0.80 | 1.00 |
| IRASim (Ours) | 0.28 | 0.48 | 0.74 | 0.96 |
Figure 6. IRASim 能模拟成功与失败 rollout,包括 bowl 从 gripper 滑出这种 fine-grained failure mode。

Pearson 0.99 看起来很漂亮,但只 4 个数据点的 correlation 信息量很有限——本质是 ranking 一致 + 大致单调。更有说服力的是论文承认必须用 post-trained rollouts(含失败案例)训练,否则 world model 学不会模拟失败,policy evaluation 会一边倒。这是一个很 honest 的细节。
3.3 Model-based planning:Push-T
Ranking-based planner:从 policy sample 条 trajectory → IRASim 各 rollout 一次 → ResNet50 预测每条 final-frame 的 IoU → 选最高的执行。Push-T 上 vanilla diffusion policy 的 IoU = 0.637。
Table 5. Push-T benchmark, IRASim 作为 world model 配合 ranking planner。 是采样轨迹数, 是训练 IRASim 用的 post-trained rollouts 数。
| Method | |||||
|---|---|---|---|---|---|
| GPC-RANK | N/A | 0.642 | - | - | 0.698 |
| GPC-RANK+OPT | N/A | 0.642 | 0.824 | 0.882 | - |
| IRASim | 0 | 0.637 | 0.679 | 0.572 | 0.418 |
| IRASim | 100 | 0.637 | 0.847 | 0.878 | 0.888 |
| IRASim | 200 | 0.637 | 0.866 | 0.916 | 0.912 |
| IRASim | 500 | 0.637 | 0.907 | 0.906 | 0.938 |
| IRASim | 1000 | 0.637 | 0.886 | 0.945 | 0.961 |
两个关键观察:
- 时 反而退化——只用 expert demos 训的 world model 不会模拟失败 trajectory,越采越多 ranking 越没意义。
- 数据规模与 test-time compute 必须同时 scale: 时 收益已饱和,需要 才能让 持续受益。
Figure 7. Model-based planning 流程:sample → simulate in IRASim → reward predict → select best for execution。

3.4 Real-robot model-based planning
3 个真机任务(关抽屉、放橘子到绿盘、放橘子到红盘), 采样自一个简单球面采样 policy,goal-image similarity 作为 value function。
Table 6. Real-robot 结果。MSE similarity 比 ResNet50 cosine similarity 显著更好,两者都远超 random baseline。
| Method | Close Drawer | Place Mandarin on Green Plate | Place Mandarin on Red Plate |
|---|---|---|---|
| Random | 0.20 | 0.07 | 0.13 |
| IRASim (ResNet50) | 0.60 | 0.73 | 0.60 |
| IRASim (MSE) | 0.87 | 0.80 | 0.87 |
❓ MSE > ResNet50 这个反直觉结果几乎没解释。可能是 ResNet50 feature 没在该 domain 上 finetune;也可能是 goal-image 像素相似度恰好是这些短任务的好 proxy。但这意味着 value function 的选择对 model-based planning 的影响可能比 world model 本身的质量还大——这是个被论文淡化的 caveat。
3.5 Flexible action controllability
用键盘(Language-Table 2D)、VR controller(RT-1 3D)输入超出训练分布的 trajectory,IRASim 仍能合理 simulate 机器人 - 物体交互,包括对 physically implausible trajectory(指令机器人穿过桌面)的”物理 robust”——机械臂被 visually 卡在桌面上而非穿透。
❓ Physical-implausibility robustness 听起来像 emergent physics understanding,但更可能是数据分布里没有”桌面被穿透”的样本,模型 default 到”trajectory 卡住”——这是 OOD failure mode 而非 physical reasoning。这块需要更严谨的对照。
关联工作
基于
- DiT (Peebles & Xie, 2023):backbone 架构与 AdaLN conditioning paradigm 直接来自 DiT
- OpenSora:policy evaluation 与 real-robot planning 实验中用作初始化权重
- SDXL VAE:latent 空间编解码,全程冻结
- DDPM / PNDM:diffusion 训练目标与 50-step sampling
对比 / Baselines
- VDM (Video Diffusion Models):pixel-space U-Net diffusion;IRASim 通过 latent + DiT 全面超越
- LVDM (Latent Video Diffusion Models):latent-space U-Net diffusion;最强 baseline,但缺乏 frame-level conditioning
- Genie:generative interactive environments,token-based、focus on game / 2D;IRASim 是 robot-specific、diffusion-based、连续 action
- GameNGen:diffusion-based real-time game engine(DOOM);IRASim 同样是 action-conditioned diffusion world model 但 target real-robot 而非 game
- iVideoGPT / MaskViT:token-based autoregressive / iterative refinement 视频预测;在 RoboNet 上对比
- GPC (Generative Predictive Control):autoregressive next-frame diffusion + planning;Push-T 上的最强对手,IRASim 用 trajectory-level joint generation 代替 next-frame autoregression
方法相关
- Sora:text-to-video DiT,作者的 conditioning paradigm 灵感来源;IRASim 把 video-level text condition 改造为 frame-level action condition
- DreamerV3 / DayDreamer:用 RSSM 学 latent world model 做 RL;IRASim 走的是 high-fidelity video generation 路线,trade off 是 inference 慢但 visual fidelity 高
- UniSim:language + action prompt text-to-video;与 IRASim 同样是 action-conditioned video world model,但 conditioning 粒度仍是 video-level
- π0 / Diffusion Policy:action chunking 的代表方法,IRASim 与之天然兼容(一次预测整个 chunk 对应的视频)
- World Model Survey:把 IRASim 归为 robot-manipulation 子方向的 fine-grained action-conditioned video model
- Robotic World Model Survey:相关 survey
论文点评
Strengths
- Frame-level conditioning 的设计非常精准——把 trajectory-to-video 与 text-to-video 的 conditioning 粒度差异讲清楚,并用最小的架构改动(per-frame AdaLN scale/shift)解决,没有引入额外 module。这是好的 first-principles design:identify gap → minimal fix。
- 三个下游任务一起验证 world model 的实用性——video quality / policy evaluation / model-based planning,避免 “video looks good but not useful” 的 critique,证明 fine-grained alignment 不只是 visual fidelity 也对 downstream control 有意义。
- Test-time scaling for manipulation 的早期信号——把 scaling chart 摆出来,展示了 manipulation 中 inference-time compute 投入的回报,而当时 LLM 圈才刚开始讨论 test-time scaling。
- Honesty 加分项:明确指出 policy evaluation 必须包含 post-trained rollouts(含失败)才能 work;明确指出 latent L2 / PSNR 比 FID / FVD 更适合 reconstruction-style task,并用 user study 论证;这些 negative observation 比 main result 信息量更大。
Weaknesses
- Inference 速度问题被轻描淡写:A100 上生成 16 帧需要 30 秒。作为 simulator 用于 RL 训练或 large-scale policy evaluation 时,这个速度根本不够——真正取代 Mujoco 还差 2-3 个数量级。论文承诺 future work distillation 但没给数据。
- Policy evaluation correlation 的 sample size 太小:Pearson 0.99 来自 4 个 model 数据点,每个 model 50 次 rollout。换不同 task / 难度差异更大的 policy 是否仍 0.99 没验证。
- Real-robot planning 的 value function 设计可能 dominate 结果:MSE > ResNet50 这个反直觉差异没有 ablation 解释,意味着 reported gain 有一部分可能来自 task-specific value function 而非 world model 自身。
- 没有与 RL-based planner(CEM/MPPI)对比——Ranking planner 是非常 simple 的算法,是否 fancy planner 还能进一步提升 / 是否 simple planner 已饱和,没有讨论。
- 数据效率不明:Push-T 上 post-trained rollouts 是怎么 scale 到更复杂的任务?real-robot 实验用了多少数据训 IRASim 没在主文交代清楚(“similar to RT-1 size”)。
可信评估
Artifact 可获取性
- 代码: inference + training,开源在 https://github.com/bytedance/IRASim
- 模型权重: 已发布 RT-1 / Bridge / Language-Table 三个 dataset 的 checkpoint(每个 ~30G)
- 训练细节: 较完整——hyperparameter table(layers=28, hidden=1152, AdamW 1e-4, batch 64, EMA 0.9999, 300k steps, gradient clip 0.1);不同 model size 的配置(33M → 679M);scaling 实验细节;compute resources 表
- 数据集: 全开源——RT-1、Bridge、Language-Table、RoboNet 都是公开 dataset;作者额外打包了 IRASim Benchmark 数据放 ByteDance 公共 OSS 与 HuggingFace(fangqi/IRASim)
Claim 可验证性
- ✅ Video quality 在 4 个 dataset 上超 baselines:Latent L2 / PSNR / SSIM 全公开,code+ckpt+data 都开源,可独立复现
- ✅ Frame-Ada > Video-Ada:直接 architectural ablation,差距虽不大但 consistent
- ✅ IRASim 与 LIBERO Mujoco evaluation 强相关:4 个 policy model 的数据点都给了,方法可复现,但相关性的统计意义弱
- ✅ Model-based planning 把 Push-T IoU 从 0.637 拉到 0.961:完整 ablation table;GPC 对比公平
- ⚠️ “Test-time scaling for robot manipulation”:只在 Push-T(2D 简化任务)+ 真机 3 个短任务上验证;推广到 long-horizon / multi-task 的能力是 extrapolation
- ⚠️ “Robust to physically implausible trajectories”:定性 demo 一例(机器人不穿透桌面),样本量过小且没有控制实验区分 “学到物理” vs “训练分布外 default 行为”
- ⚠️ “Pearson correlation 0.99 with GT simulator”:4 个数据点;correlation 的统计显著性与 generalization 都需要更多验证
Notes
- Idea seed:frame-level conditioning 的 design pattern 不只适用于 trajectory-to-video——任何”per-step 信号要驱动 per-frame 输出”的任务(speech-driven face video、music-driven dance video)都可以借鉴这种 AdaLN frame-wise modulation。
- For my agenda:作为 VLA × world model 交叉的 reference 之一,IRASim 给出了一个清晰的 evidence——high-fidelity video world model 在 manipulation 上确实能提供 actionable signal(policy evaluation + planning),不只是 visual eye candy。但 inference 慢仍是 bottleneck,distillation 路线值得跟踪。
- 可能的延伸:(a) 如果把 frame-level conditioning 换成 cross-attention 而非 AdaLN,能否处理 variable-length trajectory?(b) 把 reward / value model 也做成 trajectory-level(而非 final-frame ResNet50),能否进一步提升 model-based planning?(c) 在长 horizon autoregressive rollout 时,error accumulation 是否可以用 teacher forcing schedule 缓解?
- Tracking:作者的 follow-up(IRASim → ICCV 2025 版改名为 “Fine-Grained World Model for Robot Manipulation”)值得对比看变更。
Rating
Metrics (as of 2026-04-24): citation=34, influential=6 (17.6%), velocity=1.54/mo; HF upvotes=6; github 149⭐ / forks=11 / 90d commits=0 / pushed 290d ago · stale
分数:2 - Frontier 理由:Frame-level AdaLN conditioning 是 trajectory-to-video world model 方向的代表性设计(Strengths #1),三个下游任务 joint-validation 足够扎实(Strengths #2–3),ICCV 2025 被接收且由 ByteDance 完整开源 code + weights + benchmark,已被 WMPO 等后续 world-model-based policy optimization 工作作为 reference/baseline。不到 3 - Foundation 因为:(a) inference 30s/16 帧的速度瓶颈决定它短期内无法像 Mujoco/DROID 那样成为 de facto simulator(Weaknesses #1),(b) Pearson 0.99 只有 4 个数据点、real-robot 任务 value-function 可能 dominate 结果(Weaknesses #2–3),方向地位尚未定型;高于 1 - Archived 因为它仍是当前 fine-grained action-conditioned video world model 的必引参考,方法未被取代。