Summary
SplaTAM: Splat, Track & Map 3D Gaussians for Dense RGB-D SLAM
- 核心: 首次把 3D Gaussian Splatting 作为底层场景表示用于 dense RGB-D SLAM——单一 unposed monocular RGB-D 输入同时估计相机位姿与高保真稠密地图
- 方法: 简化 3DGS(isotropic + view-independent color)→ silhouette-guided differentiable rendering 驱动 tracking / densification / map update 三步在线循环;silhouette 同时作为 tracking gating mask 和 densification trigger
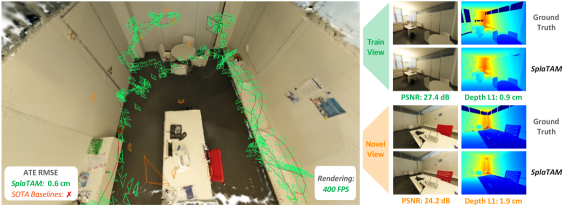
- 结果: Replica ATE 0.36cm(Point-SLAM 0.52)、ScanNet++ 1.2cm(所有 baselines fail)、TUM-RGBD 5.48cm(baselines 8.92);ScanNet++ novel-view PSNR 24.41 vs Point-SLAM 11.91;rasterization 可达 400 FPS
- Sources: paper | website | github
- Rating: 2 - Frontier(CVPR 2024 早期 3DGS-SLAM 代表作,被后续 3DGS-SLAM 工作普遍作为 baseline;但 SLAM 非我主线研究方向,按 field-centric rubric 定位 Frontier 而非 Foundation)
Key Takeaways:
- Explicit volumetric beats implicit for SLAM: 3DGS 提供显式空间外延 + 可控容量 + 近线性梯度通路,适合 incremental SLAM;NeRF-style implicit 改一处影响全局、ray sampling 限制效率(Point-SLAM 每 iteration 只采 200-1000 像素,SplaTAM 直接 rasterize 120万像素)
- Silhouette mask is the trick: 渲染 silhouette 同时承担两个职责——tracking 时只在 的 well-mapped 像素算 loss;densification 时只在 的新区域加 Gaussian。这是把 3DGS 装进 online SLAM 的关键缝合点,消融里去掉 silhouette 让 tracking 直接崩(ATE 从 0.27 → 115cm)
- Direct gradient to camera pose: Gaussian 显式 3D 位置/颜色/半径 → 像素是近线性的投影,从 photometric loss 到 pose 参数无需穿过 MLP。这是 tracking 比 NeRF-SLAM 快的根本原因——paper 明确把这一点 framing 成 “keeping camera still and moving the scene”
- Simplified 3DGS 对 SLAM 几乎无损: 去掉 anisotropy + spherical harmonic color 后 ATE/PSNR 几乎不变(rebuttal 数据:0.55→0.57cm,28.11→27.82 dB),换来 -17% 时间、-42% 内存。SLAM 场景以平面/凸面为主,anisotropy 的价值主要在细薄结构
- 同时五篇并发工作出现:作者 honestly 列出 GS-SLAM, Gaussian Splatting SLAM, Photo-SLAM, COLMAP-Free 3DGS, Gaussian-SLAM——说明 “3DGS for SLAM” 是 2023 年 12 月集体收敛的 obvious next step
Teaser. SplaTAM 在 ScanNet++ 大位移、texture-less 场景下达到 sub-cm tracking 和 400 FPS 光栅化渲染。
1. Motivation: Why explicit volumetric for SLAM
Dense visual SLAM 三十年研究的核心选择是 map representation——它决定 tracking / mapping / 下游任务的全部设计空间。论文把已有路线分为三类:
- Handcrafted explicit(points, surfels, TSDF):production-ready,但只解释观测部分,无法 novel-view synthesis;tracking 依赖丰富几何特征 + 高帧率
- Radiance field implicit(iMAP, NICE-SLAM, Point-SLAM):高保真全局地图 + dense photometric loss,但 (1) 计算昂贵——volumetric ray sampling 限制效率,只能用稀疏像素;(2) 不可编辑;(3) 几何不显式;(4) 灾难性遗忘——网络全局耦合,局部更新不可控
❓ 作者把 implicit 的 “catastrophic forgetting” 和 “spatial frontier 不可控” 并列提,其实在 SLAM 设定下这是同一问题的两面:implicit 网络无法局部更新,因为参数全局耦合——梯度优化任何一处都可能波及其他已映射区域。
3DGS [Kerbl et al. 2023] 提供第三条路:显式 + 可微渲染 + 快速光栅化。作者列出它对 SLAM 的四个优势:
- Fast rendering & rich optimization: rasterization 而非 ray marching;可承受 per-pixel dense photometric loss。作者进一步简化(去 SH、isotropic)让 splatting 对 SLAM 更快
- Maps with explicit spatial extent: 渲染 silhouette 立刻判断 “这个像素是不是已建图区域”——implicit 做不到,因为网络优化期间梯度会改变未映射空间
- Explicit map: 加容量 = 加 Gaussian;可编辑;不用重训网络
- Direct gradient flow: Gaussian 参数 → 渲染像素是近线性投影;camera pose 梯度类似(“keeping camera still and moving the scene”),无需穿过 MLP
Figure 1. Left: SplaTAM 在 texture-less + 大位移场景下达到 sub-cm 定位(绿框为估计位姿,紧贴蓝框 GT),Point-SLAM 与 ORB-SLAM3 tracking 失败。Right: train + novel view 在 876×584 分辨率下 400 FPS 渲染。
2. Method
2.1 Gaussian Map Representation
相比原版 3DGS,SplaTAM 做两个简化:view-independent color(去 spherical harmonics)+ isotropic Gaussian(单半径 而非协方差矩阵)。每个 Gaussian 8 个参数:RGB color 、center 、radius 、opacity 。
Equation 1. Gaussian influence function
❓ 简化 anisotropy 的 trade-off?原版 3DGS 用 anisotropic covariance 是为了拟合细薄结构(树叶、绳子)。SLAM 场景以平面/凸面为主,isotropic 应该损失不大——rebuttal Table 7 确认了这一点(见 §3 消融)。
2.2 Differentiable Splatting Rendering
Front-to-back sort 后 alpha-compositing。除了 RGB,作者额外渲染 depth 和 silhouette——这是 SplaTAM 区别于 vanilla 3DGS 的关键扩展:
Equation 2-4. Color / Depth / Silhouette rendering
Splatting 到 2D 时参数变为 ,,其中 。
是 alpha 累积,语义上解读为 “该像素被当前 map 覆盖的置信度 / epistemic uncertainty 的负指标”——这是后续 tracking mask 和 densification trigger 的共同来源。
2.3 SLAM Pipeline
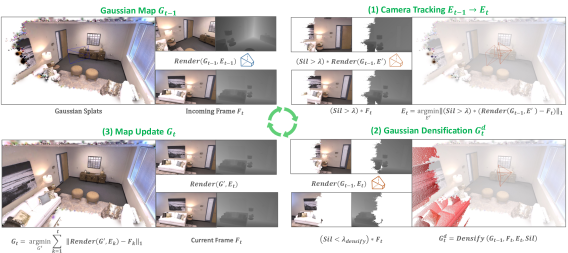
Figure 2. SplaTAM Overview。给定新 RGB-D frame,循环三步:(1) 用 silhouette-guided rendering 优化相机位姿;(2) 基于 silhouette + depth 残差加新 Gaussian;(3) 固定位姿,warm-start 上次 map 参数,用 keyframe set 更新 Gaussian。
Initialization
第一帧跳过 tracking(pose = identity),silhouette 全零 → 所有像素都用于初始化新 Gaussian:center 在 unproject 的 3D 点,color 取像素 RGB,opacity 0.5,radius 设为投影回去恰好 1 像素:
Equation 5. Initial radius
Step 1: Camera Tracking
- Constant-velocity 初始化 pose:(相机参数化为 translation + quaternion)
- Gradient-based 迭代更新 pose,Gaussian 参数 frozen,loss 只在 的可信像素上算:
Depth L1 + 0.5× color L1(权重经验调出来;rebuttal 给出 range 分析)。Silhouette gating 是核心:新观测的区域 map 未覆盖,若直接算 loss 会污染 pose 梯度。L1 在缺失 GT depth 像素上取 0(处理真实数据集的深度空洞)。
Step 2: Gaussian Densification
定义 densification mask:
两类像素需要新 Gaussian:
- (a) Silhouette 不足(,map 未覆盖)
- (b) 前方有被遮挡的新几何——GT depth < rendered depth(GT 更近)且深度误差 > 50× MDE(median depth error),说明当前 map 漏掉了前方挡住后面已有几何的结构
❓
50×MDE的阈值在 rebuttal 中作者承认是 “empirically by visualizing the densification mask” 调出来的 magic number。这种经验阈值在 cross-dataset 上的鲁棒性存疑——ScanNet++ / Replica 都是 benign indoor,未在工业、户外、动态场景验证。
新 Gaussian 初始化方式同 first-frame:center 在 unproject 点,opacity 0.5,radius = 。
Step 3: Map Update
- Camera poses fixed,Gaussian 参数更新
- Warm-start 自上一轮 map(不从头训)
- Keyframe 选择:每 帧存一个 keyframe,优化 个:当前帧 + 最近 keyframe + 个与当前帧 frustum overlap 最大的历史 keyframe。Overlap 定义为 “当前帧深度图反投影后落入历史 keyframe frustum 的点数”
- Loss 同 tracking 但不用 silhouette mask(要全像素优化),额外加 SSIM RGB loss,cull 掉 opacity≈0 或过大的 Gaussian(沿用 [Kerbl et al. 2023],但只是其 culling 的子集——不含 splitting)
❓ Rebuttal Q8:作者承认没做 BA(jointly 优化 pose + map),理由是当前 3DGS rasterizer 不支持 batched rasterization,多 pose 联合优化不可行。这是个工程限制而非方法局限——说明 SplaTAM 不是严格意义上的 dense BA SLAM,全局一致性完全靠 keyframe overlap 局部处理。
3. Experiments
3.1 Datasets & Protocol
四个 benchmark:
- Replica [Straub 2019]: 合成 indoor,标准 RGB-D SLAM benchmark,位移小、depth 干净
- TUM-RGBD [Sturm 2012]: 真实场景,老相机 → RGB 运动模糊 + depth 稀疏
- ScanNet [Dai 2017]: 真实 indoor,质量类似 TUM-RGBD
- ScanNet++ [Yeshwanth 2023]: 作者引入用于 NVS 评估——DSLR 高质量 + 独立的 novel-view 采集轨迹;但连续帧位移非常大(“about the same as a 30-frame gap on Replica”)
ATE RMSE 为 tracking 指标;PSNR/SSIM/LPIPS + Depth L1 为 rendering 指标。Baselines 数字(除 ScanNet++)直接取自 Point-SLAM 论文。报告 3 seeds 平均。
3.2 Camera Pose Estimation
Table 1(摘录). ATE RMSE [cm] ↓,baselines 数字取自 Point-SLAM
| Dataset | NICE-SLAM | ESLAM | Point-SLAM | SplaTAM |
|---|---|---|---|---|
| Replica Avg | 1.06 | 0.63 | 0.52 | 0.36 |
| TUM-RGBD Avg | 15.87 | — | 8.92 | 5.48 |
| Orig-ScanNet Avg | 10.70 | — | 12.19 | 11.88 |
| ScanNet++ S1+S2 | — | — | fail | 1.2 |
核心观察:
- Replica:−30% over Point-SLAM(0.52 → 0.36cm)
- TUM-RGBD:−39%(8.92 → 5.48cm),但ORB-SLAM2 feature-based 1.98cm 仍明显更好——sparse feature 在 motion-blur + 稀疏 depth 的老 camera 数据上更鲁棒
- Orig-ScanNet:与 Point-SLAM/NICE-SLAM 打平(10+cm 级别,dense volumetric 方法在低质量相机上都崩)
- ScanNet++:Point-SLAM 和 ORB-SLAM3 完全 fail(texture-less 让 ORB-SLAM3 反复重初始化),SplaTAM 独家成功——这是论文最强的定量证据
❓ “Up to 2×” 的 claim 是 best case(TUM-RGBD 近 2×);准确一般化应该是 “consistently better on 3 of 4 benchmarks, fails gracefully where dense methods fail together”。
3.3 Rendering Quality
Table 2. Replica Train-View rendering(8 scenes avg)
| Metric | Vox-Fusion | NICE-SLAM | Point-SLAM* | SplaTAM |
|---|---|---|---|---|
| PSNR ↑ | 24.41 | 24.42 | 35.17 | 34.11 |
| SSIM ↑ | 0.80 | 0.81 | 0.98 | 0.97 |
| LPIPS ↓ | 0.24 | 0.23 | 0.12 | 0.10 |
* Point-SLAM 用 GT depth 做 rendering(不 apples-to-apples)
作者自己承认 train-view rendering “is irrelevant because methods can simply overfit to these images”——所以引入 ScanNet++ 做 novel-view benchmark:
Table 3. ScanNet++ Novel-View + Train-View Rendering(S1 + S2 avg)
| Metric | Point-SLAM | SplaTAM |
|---|---|---|
| Novel PSNR ↑ | 11.91 | 24.41 |
| Novel SSIM ↑ | 0.28 | 0.88 |
| Novel LPIPS ↓ | 0.68 | 0.24 |
| Novel Depth L1 [cm] ↓ | N/A (需 GT depth) | 2.07 |
| Train PSNR ↑ | 14.46 | 27.98 |
2× novel-view PSNR gap 的真正原因是:Point-SLAM 在 ScanNet++ 上 tracking 完全 fail → map 位姿全错 → novel-view 渲染崩溃。不是 rendering module 不好,而是 tracking 不住。
Figure 3. ScanNet++ S2 重建可视化:估计位姿(绿框 + 红轨迹)与 GT(蓝框 + 蓝轨迹)紧密贴合,稠密表面重建高保真。

Video. Replica Room 0 SplaTAM novel-view 渲染——直接从优化好的 Gaussian map 渲染 novel view RGB。作者明确披露同图比对中 NICE-SLAM / Point-SLAM 用了 GT novel-view depth,SplaTAM 不依赖。
Video. iPhone 在线重建 collage——RGB-D 来自 iPhone camera + ToF,展示真实手持设备可用性(源于 rebuttal 承诺)。
3.4 Ablations(Replica Room 0)
Table 4. Camera Tracking Ablation
| Velo. Prop. | Silhouette Mask | Sil. Thresh. | ATE [cm] ↓ | Dep L1 ↓ | PSNR ↑ |
|---|---|---|---|---|---|
| ✗ | ✓ | 0.99 | 2.95 | 2.15 | 25.40 |
| ✓ | ✗ | 0.99 | 115.80 | 0.29 | 14.16 |
| ✓ | ✓ | 0.5 | 1.30 | 0.74 | 31.36 |
| ✓ | ✓ | 0.99 | 0.27 | 0.49 | 32.81 |
- Silhouette 是生死线:去掉后 ATE 从 0.27 → 115.80cm(tracking 彻底垮)
- Threshold 0.99 vs 0.5:5× 差距(1.30 → 0.27cm)——越严格 = 只在 well-optimized 像素算 loss,避免被新区域污染
- Velocity propagation 贡献约 11×(2.95 → 0.27cm):对大位移场景尤其重要
Table 5. Color/Depth Loss Ablation
| Track Color | Map Color | Track Depth | Map Depth | ATE [cm] ↓ | Dep L1 ↓ | PSNR ↑ |
|---|---|---|---|---|---|---|
| ✗ | ✗ | ✓ | ✓ | 86.03 | fail | fail |
| ✓ | ✓ | ✗ | ✗ | 1.38 | 12.58 | 31.30 |
| ✓ | ✓ | ✓ | ✓ | 0.27 | 0.49 | 32.81 |
- 只有 depth 不行:x-y 平面缺信息,tracking 完全崩
- 只有 color 能跑:但 ATE 5× 差、depth 恶化(但 densification 仍用 depth 做初始化)
- 两者协同才是 SOTA
Table 7 [Rebuttal]. Isotropic vs Anisotropic Gaussians on ScanNet++ S1
| Distribution | ATE [cm] ↓ | Train PSNR ↑ | Novel PSNR ↑ | Time [%] ↓ | Memory [%] ↓ |
|---|---|---|---|---|---|
| Anisotropic | 0.55 | 28.11 | 23.98 | 100 | 100 |
| Isotropic | 0.57 | 27.82 | 23.99 | 83.3 | 57.5 |
结论:isotropic 在 SLAM 场景下几乎无损(ATE ±0.02cm、PSNR ±0.3 dB),换来 -17% time + -42% memory。支撑 §2.1 的 design 选择。
3.5 Runtime
Table 6. Runtime on Replica Room 0 (RTX 3080 Ti)
| Method | Track/iter | Map/iter | Track/frame | Map/frame | ATE [cm] |
|---|---|---|---|---|---|
| NICE-SLAM | 30 ms | 166 ms | 1.18 s | 2.04 s | 0.97 |
| Point-SLAM | 19 ms | 30 ms | 0.76 s | 4.50 s | 0.61 |
| SplaTAM | 25 ms | 24 ms | 1.00 s | 1.44 s | 0.27 |
| SplaTAM-S | 19 ms | 22 ms | 0.19 s | 0.33 s | 0.39 |
关键观察:
- SplaTAM 每 iter 渲染 1200×980 ≈ 1.2M 像素,Point-SLAM/NICE-SLAM 每 iter 只采 200-1000 像素——3 个数量级差距,但 rasterization 效率让 per-iter 时间相当
- SplaTAM-S 版本:tracking 40→10 iter/frame、mapping 60→15 iter/frame + 半分辨率 densification → 5× 加速,ATE 仅从 0.27 → 0.39cm 小幅降级。实用性强
3.6 Limitations
作者在 §5 末尾自己列出:
- 对 motion blur、大 depth 噪声、激进 rotation 敏感(需 temporal modeling 缓解)
- 未 scale 到大场景(建议走 OpenVDB 等 efficient 表示)
- 依赖已知 camera intrinsics + dense depth(对比 monocular 的 Gaussian Splatting SLAM 工作,硬件门槛更高)
4. Concurrent Work
作者在 project page 罕见地诚实列出 5 篇同期 3DGS-SLAM 工作,思路各异:
- GS-SLAM:coarse-to-fine tracking + sparse Gaussian selection
- Gaussian Splatting SLAM (MonoGS):monocular(无需深度),densification 用 depth 统计
- Photo-SLAM:ORB-SLAM3 tracking + 3DGS mapping 解耦
- COLMAP-Free 3DGS:mono depth estimation + 3DGS
- Gaussian-SLAM:DROID-SLAM tracking + 主动/非主动 3DGS sub-maps
这种 cluster 本身是个信号——3DGS 出来 5 个月内 5 组独立收敛到 “用它做 SLAM”,说明显式可微表示对 SLAM 是 “obvious next step”。SplaTAM 的差异化在 silhouette-guided unified pipeline(三步全用同一 differentiable rasterizer,没有 hybrid tracker),而非 Photo-SLAM/Gaussian-SLAM 的 hybrid 耦合。
关联工作
基于
- 3D Gaussian Splatting [Kerbl et al. SIGGRAPH 2023]: 底层表示与可微 rasterizer
- Dynamic 3D Gaussians [Luiten et al. 2023]: 同一作者前作,把 3DGS 扩到 dynamic scene 的 6-DOF tracking——SplaTAM 是其 SLAM 化
对比 (Implicit SLAM baselines)
- iMAP [Sucar et al. ICCV 2021]: 第一个用 neural implicit 做 SLAM 的工作
- NICE-SLAM [Zhu et al. CVPR 2022]: hierarchical multi-feature grids,扩展 iMAP scalability
- Point-SLAM [Sandström et al. ICCV 2023]: neural point cloud + volumetric rendering,最强 implicit baseline——SplaTAM 正面对比对象
- ESLAM [Johari et al. CVPR 2023]: hybrid SDF-based
- Vox-Fusion [Yang et al. 2022]
对比 (Traditional dense SLAM)
- KinectFusion [Newcombe 2011]: TSDF 经典
- BundleFusion [Dai 2017]: globally consistent TSDF
- ElasticFusion [Whelan 2015]: surfel-based,differentiable rasterization 先驱
- BAD SLAM [Schops 2019]: bundle-adjusted RGB-D direct method
- ORB-SLAM2/3 [Mur-Artal, Campos]: feature-based sparse,TUM-RGBD 仍 SOTA
Concurrent (3DGS-SLAM)
- GS-SLAM, Gaussian Splatting SLAM (MonoGS), Photo-SLAM, COLMAP-Free 3DGS, Gaussian-SLAM——见 §4
数据集
- ScanNet++ [Yeshwanth ICCV 2023]: 高保真 indoor benchmark,作者引入用于 NVS evaluation
论文点评
Strengths
- 方法极简而 unified:tracking / densification / map update 共用一套 differentiable splatting + photometric loss,没有 ORB-SLAM / DROID 这样的外部 tracker。silhouette mask 一个机制同时解决 tracking gating 和 densification 触发——是 “simple, scalable, generalizable” 的好例子(Ablation Table 4 验证:去掉 silhouette 直接 tracking 崩)
- Direct gradient 论证有 first-principles 味道:作者明确指出 “Gaussian 参数到像素是近线性投影 + camera 等价于 inverse scene motion”,这是为什么 implicit-SLAM tracking 慢/难收敛的根本原因。这种 framing 比单纯 benchmark 数字更有 explanatory power
- Honest disclosure:concurrent work 全列;rebuttal 中承认 50×MDE 是经验值;明确披露 NICE-SLAM/Point-SLAM 在 NVS 时使用 GT depth,SplaTAM 不依赖;ATE Orig-ScanNet 没赢也照实写 “competitive”。这种诚实度在 SOTA-claiming 论文里罕见
- 完整 ablation 覆盖设计关键点:silhouette threshold、velocity propagation、color-only vs depth-only 都独立验证;rebuttal 补齐 isotropic vs anisotropic
- Open source + iPhone demo:codebase + 真实手持设备(camera+ToF)验证,易于复用。SplaTAM-S 变体提供 5× 加速/小幅 ATE 降级的实用选项
Weaknesses
- 依赖准确 RGB-D:硬件门槛较高。Concurrent 的 Gaussian Splatting SLAM(MonoGS)直接做 monocular,方法上 ceiling 更高——SplaTAM 的 first-principles 优势部分被硬件依赖稀释
- No loop closure / global BA:纯前向增量 + 局部 keyframe overlap,silhouette gating 是局部机制。Rebuttal Q8 作者承认 “BA doesn’t help” 但归因于 rasterizer 不支持 batched——是工程限制不是方法极限。大场景长轨迹下 drift 必然累积,论文未讨论
- Magic numbers 较多:(tracking)、(densification)、、opacity init、color-loss weight ——这些阈值在 Replica/ScanNet++ 这类 benign indoor 之外的鲁棒性未充分验证
- Limitations 开诚布公但未解决:motion blur + 激进 rotation + 大场景——都是 embodied / AR 实际落地必须应对的场景。论文定位为 “opens up avenues”
- Tracking 是 per-frame iterative optimization:每帧 40 iter(SplaTAM-S 10 iter),“online” 但不是严格 real-time(Replica 1 s/frame)。对 camera 10+ FPS 输入的实时处理尚不够
可信评估
Artifact 可获取性
- 代码: 完整开源(inference + training),github.com/spla-tam/SplaTAM;README 附 Replica / ScanNet / ScanNet++ / TUM-RGBD / iPhone 的独立 config
- 模型权重: N/A —— SLAM 是 per-scene online optimization,无 pretrained weights
- 训练细节: README 提供完整超参 config(每 dataset 独立 YAML 含 tracking/mapping iter 数、loss 权重、threshold)
- 数据集: 全部公开 benchmark(Replica / TUM-RGBD / ScanNet / ScanNet++)
Claim 可验证性
- ✅ 400 FPS rendering @ 876×584:可由开源代码 + 单 GPU 验证;splatting rasterization 速度有 [Kerbl 2023] 上游证据
- ✅ 优于 NICE-SLAM / Point-SLAM 的 ATE RMSE:开源 + 标准 benchmark 可独立复现;作者注明 baselines 数字直接取自 Point-SLAM
- ✅ Ablation 是干净的 component-wise (Table 4, 5, 7):逐项移除设计选择,结论 grounded
- ⚠️ “Up to 2× SOTA”:best-case 数字(TUM-RGBD 近 2×、novel-view PSNR > 2×);Orig-ScanNet 仅 “competitive”。一般化应说 “consistently better on 3 of 4 benchmarks”
- ⚠️ NVS 对比 Point-SLAM 的 12.47 PSNR gap:主因 Point-SLAM tracking 失败而非 rendering 本身弱——apples-to-oranges 风险;Fair 对比应是 “post-hoc align poses 后 rendering 质量”
- ⚠️ Sub-cm tracking on texture-less:Fig 1 的 “baselines fail” 是定性 cherry-pick,未量化 failure rate(如多少序列/百分比下 ORB-SLAM3 触发 re-init)
Notes
- 对我研究的意义:3DGS-SLAM 这一 line 与 spatial intelligence / embodied perception 间接相关——若 embodied agent 需要 online 构建 high-fidelity 可查询 3D map,SplaTAM 这类方法是自然候选。但纯 SLAM 不是我研究主线,本笔记定位为 indexed reference
- 可借鉴的 design pattern:silhouette mask 作为 epistemic uncertainty proxy 是个简洁 idea——“用 model 自身的覆盖度判断该不该相信 loss”。在其他在线学习 / 增量优化场景也许可借鉴(如 streaming VLM continual learning 中用 “model confidence” 做 sample gating)
- Pivot 信号:5 篇并发 = obvious idea。“早一步发出来” 的 SplaTAM 拿到 CVPR + 高引,但同期任一篇都能做出类似贡献。从 idea-generation 角度:当方法变成 obvious 时,再追随就是 marginal contribution——真正的 edge 在更难的问题(mono?loop closure?dynamic?)
- Open questions:
- 3DGS-SLAM 后续是否解决了 loop closure / global BA?需要查 2024-2025 follow-up(LoopSplat 等)
- Isotropic 假设在反光 / 细结构 / 户外场景是否仍成立?rebuttal 只给了 indoor ScanNet++
- 简化掉 SH 对 high-variance lighting 的影响?
Rating
Metrics (as of 2026-04-24): citation=574, influential=128 (22.3%), velocity=20.07/mo; HF upvotes=2; github 2101⭐ / forks=236 / 90d commits=0 / pushed 673d ago · stale
分数:2 - Frontier
理由:SplaTAM 是 CVPR 2024 早期 3DGS-SLAM 代表作——开源完整、被 GS-SLAM/MonoGS/Photo-SLAM 等后续 3DGS-SLAM 普遍作为 baseline;silhouette-guided unified pipeline + direct-gradient 论证具备 first-principles 清晰度(Strengths 1-2);消融与 runtime 完整(Table 4-7)。不给 3 的原因是按 field-centric rubric——SLAM 不是我的主线方向(VLA / Agent / Embodied),且在 3DGS-SLAM 内部同期并发 5 篇思路收敛(§4),SplaTAM 是时间上稍先的 Frontier 而非独家奠基;不给 1 的原因是它仍是当前 3DGS-SLAM 方向的标准对比对象,作为 indexed reference 对 embodied spatial mapping 的延伸阅读仍具价值。