Summary
Embodied Web Agents
- 核心: 提出跨物理-数字域的 AI agent 范式,构建统一仿真平台和 ~1.5k 任务 benchmark
- 方法: 集成 AI2-THOR (indoor) + Google Earth (outdoor) + 5 个功能性 web 界面,覆盖 cooking/navigation/shopping/traveling/geolocation
- 结果: 最佳模型 overall accuracy 远低于人类(cooking 6.4% vs 77%),66.6% 错误是 cross-domain integration failure
- Sources: paper | website | github
- Rating: 2 - Frontier(首次系统化将 web + embodied 统一为 cross-domain benchmark,NeurIPS 2025 Spotlight,但尚未成为方向 de facto 标准)
Key Takeaways:
- 跨域集成是瓶颈: 当前 LLM agent 在 web-only 和 embodied-only 子任务上表现尚可,但跨域整合时 overall accuracy 骤降(cooking 最佳模型仅 6.4% vs 人类 77%),66.6% 的 cooking 错误属于 cross-domain errors
- Web > Embodied: 所有模型在 web-only accuracy 上一致高于 embodied-only accuracy,说明当前模型处理数字信息的能力远强于物理交互
- 主动探索+Web 信息显著提升 geolocation: 相比 passive baseline (FairLocator),embodied agent 在 city-level 准确率提升 10+%,甚至查询本身(formulating search queries)就能作为 self-supervision 帮助推理
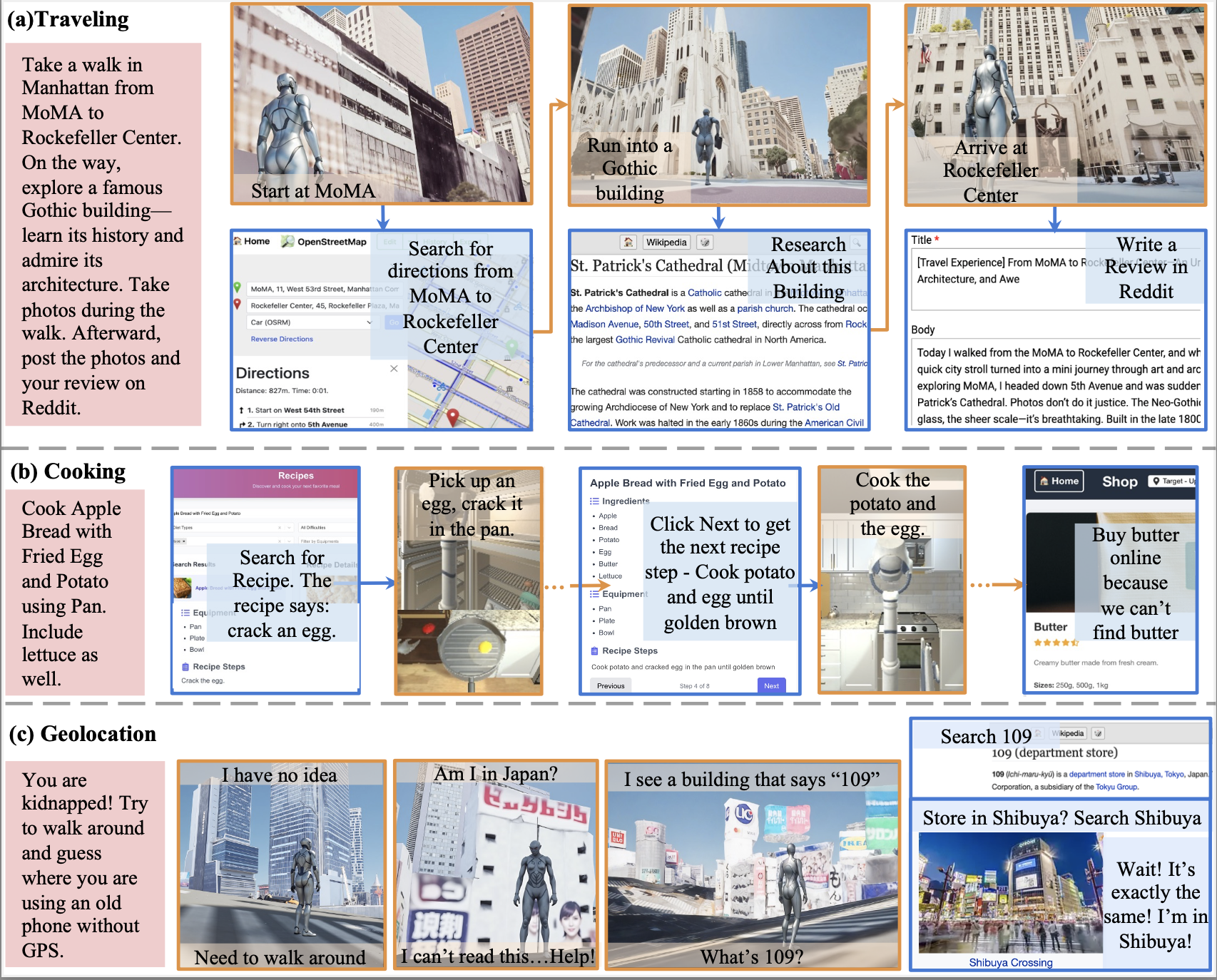
Teaser. Embodied Web Agents 概念范式示意:agent 在物理环境(橙色)和 Web 环境(蓝色)之间流畅切换,完成 traveling、cooking、geolocation 等跨域任务。
Introduction
当前 AI agent 普遍是 siloed 的:web agent 在屏幕上检索信息和推理,embodied agent 在物理世界中感知和行动,但二者很少结合。这种分离限制了 agent 解决需要跨域智能的任务的能力——比如根据网上食谱做菜、用动态地图数据导航、利用 web 知识理解现实地标。
论文提出三个核心挑战:
- Perceptual grounding problem: 如何将抽象的数字指令(如”cook potato and egg until golden brown”)与高维物理世界数据流对齐?
- Cross-domain planning: agent 如何决定何时在物理行动和数字信息检索之间切换?尤其当两个域的信息矛盾时(如地图路线 vs 实际道路封闭)
- Persistent representation: agent 需要维护一个连贯的跨域表示——在 web 操作时回忆物理经验,在物理行动时检索数字知识
The Embodied Web Agent Task Environments
环境形式化为 ,其中 是 combined physical-digital state space, 是跨域 action space, 包含 embodied input 和 web perception , 是确定性转移函数。
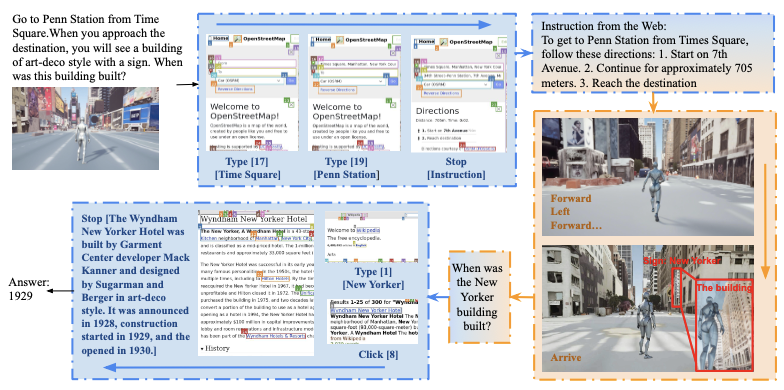
Figure 2. 任务完成的示例 pipeline:agent 在 web(蓝色)和 embodied(橙色)环境间交替切换,完成从 Time Square 到 Penn Station 的导航+问答任务。
Outdoor Environment
基于 Google Street View 和 Google Earth API 构建,选取纽约、波士顿、费城、匹兹堡四座城市。环境建模为无向图 ,每个节点 是一个 GPS 坐标,关联东南西北四个方向的 field-of-view 图像。Agent 通过观察视觉输入、访问邻居节点集、利用朝向信息来推理空间转移。
Indoor Environment
使用 AI2-THOR 构建逼真的 3D 室内厨房场景。物体带有属性和状态(isSliced、isCooked、parentReceptacles 等),随 agent 执行物理动作动态更新。State evaluator 对比当前厨房状态与理想目标状态来判定任务完成度。
Web Environment
由五个功能性网站组成,使用 React.js 前端 + FastAPI 后端:
- Homepage: 导航 hub,链接所有 task-specific 网站
- Recipe website: 按食材、饮食偏好、菜系类型浏览/搜索/筛选食谱
- Shopping website: 购物车管理、食材查找、模拟结算
- OpenStreetMap: 位置搜索、地址查询、地理实体探索
- Wikipedia: 百科信息检索、entity linking、multi-hop reasoning
部分网站改编自 WebArena benchmark。
The Embodied Web Agents Benchmark Construction
Benchmark 包含约 1.5k 任务,覆盖 5 个领域:
- Navigation (144 tasks): 将 web 方向指令 ground 到 embodied 导航,需要双向 web-embodied 交互
- Shopping (216 tasks): 线上比价+下单 → 线下导航取货,测试多源整合和序列规划
- Traveling (110 tasks): 导航中遇到地标时查 Wikipedia、理解建筑风格、将文字描述 ground 到视觉观察
- Cooking (911 tasks): 识别厨房食材 → 在线搜索匹配食谱 → 按步骤执行,需持续对齐 web 指令与物理状态
- Geolocation (142 tasks): 受 GeoGuessr 启发,agent 在环境中主动探索+查 web 来判断位置,改编自 FairLocator
Experiments
Baseline LLM Agents
评估四个 baseline:GPT-4o(-mini)、Gemini 2.0 Flash、Qwen-VL-Plus、InternVL2.5-latest。Web 观测遵循 VisualWebArena 设置。
Evaluation Metrics
四个评估维度:
- Overall Accuracy: 完整跨域任务完成率
- Web-only Accuracy: 仅 web 子任务完成率
- Embodied-only Accuracy: 仅 embodied 子任务完成率
- Overall Completion Rate: 已满足状态条件占总目标条件的比例
Result Analysis
Table 2. Outdoor 任务性能(Navigation / Shopping / Traveling)
| Task | Metric | GPT | Gemini | Qwen | Intern | Human |
|---|---|---|---|---|---|---|
| Navigation | Overall Accuracy | 34.72 | 30.56 | 15.97 | 13.19 | 90.28 |
| Navigation | Web-only Acc | 69.44 | 67.36 | 57.64 | 38.89 | 92.36 |
| Navigation | Embodied-only Acc | 48.61 | 46.53 | 31.25 | 23.61 | 90.97 |
| Shopping | Overall Accuracy | 25.46 | 23.61 | 13.89 | 10.65 | 92.59 |
| Shopping | Web-only Acc | 39.35 | 37.50 | 23.15 | 17.13 | 93.06 |
| Shopping | Embodied-only Acc | 34.26 | 32.41 | 17.59 | 12.96 | 93.98 |
| Traveling | Overall Accuracy | 30.91 | 25.45 | 11.82 | 9.09 | 91.82 |
| Traveling | Web-only Acc | 57.27 | 53.64 | 41.82 | 25.45 | 94.55 |
| Traveling | Embodied-only Acc | 47.27 | 44.55 | 29.09 | 19.09 | 92.73 |
Insights: GPT-4o-mini 一致领先但仍远低于人类。Web-only accuracy 始终高于 embodied-only accuracy,说明模型处理数字信息的能力强于物理导航。Shopping 和 traveling 涉及更丰富的跨域交互和更长序列,overall accuracy 显著低于 navigation。
Table 3. Cooking 任务性能(Vision vs Text modality)
| Metric | Vision-GPT | Vision-Gemini | Vision-Qwen | Vision-Intern | Text-GPT | Text-Gemini | Text-Qwen | Text-Intern | Human |
|---|---|---|---|---|---|---|---|---|---|
| Overall Acc | 5.4 | 4.1 | 0.6 | 0.0 | 6.4 | 5.8 | 1.5 | 0.4 | 77.08 |
| Completion Rate | 40.26 | 35.62 | 15.91 | 9.73 | 39.16 | 38.92 | 17.20 | 10.02 | 85.37 |
| Web Acc | 59.71 | 47.74 | 28.65 | 10.64 | 57.08 | 62.23 | 35.89 | 15.58 | 100 |
| Embodied Acc | 8.7 | 6.1 | 2.2 | 0.9 | 10.5 | 8.2 | 4.1 | 1.3 | 77.08 |
Insights: 最佳模型(text-based GPT-4o)overall accuracy 仅 6.4%,而人类达到 77.08%。Text-based 模型(使用 structured scene graph)一致优于 vision-based(使用 first-person view),说明当前模型在 cooking context 下的 visual grounding 仍然很弱。Completion rate 适中(~40%),说明模型能完成部分子任务但在 full cross-domain integration 上失败。
Table 4. Geolocation 任务性能(FairLocator baseline vs Embodied Web Agent)
| Setting / Model | Continent | Country | City | Street | All |
|---|---|---|---|---|---|
| FairLocator: GPT-4o-mini | 90.85 | 81.69 | 73.24 | 1.41 | 1.41 |
| FairLocator: Gemini-2.0-Flash | 93.66 | 85.92 | 78.17 | 0.70 | 0.70 |
| Embodied: GPT-4o-mini | 97.18 | 90.85 | 85.21 | 3.52 | 3.52 |
| Embodied: Gemini-2.0-Flash | 97.18 | 94.37 | 85.21 | 4.23 | 4.23 |
| Embodied: Qwen-VL-Plus | 80.28 | 69.01 | 49.30 | 0.00 | 0.00 |
| Embodied: InternVL2.5-Latest | 93.62 | 77.30 | 57.45 | 2.13 | 1.42 |
Insights: 主动探索+Web 访问(Embodied Web Agent)在所有模型上一致优于 passive baseline(FairLocator),尤其在 city 和 street 粒度上提升显著。有趣的是,即使 Wikipedia 搜索结果 noisy,formulating search queries 本身也能帮助 agent 更自信地推理——查询行为作为一种 self-supervision。
Error Analysis
对 GPT-4o cooking 任务的错误类型分析:
- Cross-domain errors (66.6%): 占绝对主导
- 23.7% stuck in embodied environment(重复执行无关物理动作,不切回 web)
- 16.7% switching without action(频繁切换环境但不执行有意义操作)
- 13.2% stuck in web environment(无限点击”next”翻食谱页面)
- 11.8% instruction-action misalignment(如食谱说”slice the apple”却去切 lettuce)
- Embodied errors (14.6%): 5.2% 无法导航到可交互物体,4.5% 重复动作
- Web errors (8.0%): 3.1% page loop,4.3% repeated web actions
关键发现:isolated domain errors 远少于 cross-domain integration failures,确认跨域集成是 embodied web agency 的核心瓶颈。
关联工作
基于
- WebArena: 提供了部分 web 环境(OpenStreetMap、Wikipedia)的基础,web observation 也遵循 VisualWebArena 设置
- AI2-THOR: 室内 embodied 环境的仿真基础
- FairLocator: geolocation 任务的 baseline 和数据来源
对比
- MiniWoB / WebShop / Mind2Web: 纯 web agent benchmark,不涉及 embodied interaction
- ALFRED / BEHAVIOR: 纯 embodied benchmark,不涉及 web interaction
- GPT-4o / Gemini 2.0 Flash / Qwen-VL-Plus / InternVL2.5: 作为 baseline 模型评估
方法相关
- VisualWebArena: web observation 的 Set-of-Marks (SoM) annotation 方法
- Google Street View API: outdoor environment 的视觉数据来源
论文点评
Strengths
- 问题定义有价值: 将 web agent 和 embodied agent 两个长期独立发展的方向统一到一个框架下,提出了一个真实且有挑战性的研究范式。日常生活中大量任务确实需要同时利用 web 信息和物理交互
- Benchmark 设计系统: 5 个领域覆盖了从简单(navigation)到复杂(cooking)的多种跨域交互模式,评估维度(overall / web-only / embodied-only / completion rate)设计合理,能精确定位 failure mode
- Error analysis 有洞察: 66.6% cross-domain error 的发现直指当前 LLM agent 的核心短板——不是不会做子任务,而是不会在域间切换和协调
- NeurIPS Spotlight: 数据集和代码已开源,benchmark web 环境可直接访问
Weaknesses
- 仿真与现实的 gap: 论文自己也承认 simulated agents 可能无法捕捉真实物理-数字交互的复杂性和不可预测性。AI2-THOR 的厨房和 Google Street View 与真实机器人操作差距较大
- Web 环境较简化: 5 个网站虽然功能完整,但与真实 web 的复杂度(广告、动态内容、认证、多跳搜索)相比仍然是 controlled setting
- 缺少方法创新: 论文主要是 benchmark contribution,没有提出新的 agent architecture 来改善 cross-domain integration。所有 baseline 都是 off-the-shelf LLM
- Geolocation 的 “All” 指标极低: 即使有 web 和 exploration,street-level accuracy 仍然 < 5%,说明当前 benchmark 在某些维度可能过难,难以区分方法改进
可信评估
Artifact 可获取性
- 代码: inference-only(提供了 baseline 运行代码和环境搭建脚本)
- 模型权重: 无自有模型,使用的均为商业 API(GPT-4o、Gemini 等)
- 训练细节: 不适用(benchmark 论文,无训练)
- 数据集: 开源(GitHub 仓库 + 在线 benchmark web 环境 http://98.80.38.242:1220/ )
Claim 可验证性
- ✅ 性能数据:四个模型在五个任务域上的详细数值均有报告,可通过开源代码复现
- ✅ Error analysis 分类与百分比:给出了具体错误类型和占比
- ⚠️ “novel paradigm” 的 claim:虽然统一 web+embodied 确实较新,但 ALFRED 等之前的工作已经涉及 instruction following + embodied action,novelty 主要在于 web interaction 的加入而非全新范式
- ⚠️ 人类基线的具体评估方式未充分说明(如人类测试者数量、training 程度、inter-rater agreement)
Notes
Rating
Metrics (as of 2026-04-24): citation=11, influential=0 (0.0%), velocity=1.08/mo; HF upvotes=23; github 36⭐ / forks=5 / 90d commits=0 / pushed 329d ago · stale
分数:2 - Frontier 理由:这是第一个系统将 web agent + embodied agent 统一到同一 benchmark 的工作,NeurIPS 2025 D&B Spotlight,benchmark 设计系统、error analysis(66.6% 跨域错误)揭示了 LLM agent 的核心短板,具备作为 cross-domain agent 评测前沿的条件;但它本身是 benchmark contribution 无方法创新(见 Weaknesses 3),环境仍是受控仿真(Weaknesses 1-2),方向尚新也未形成 ALFRED / WebArena 级的 de facto 地位,所以不到 3 - Foundation。