Summary
OmniParser for Pure Vision Based GUI Agent
- 核心: 把 GUI screenshot 解析成结构化(bbox + 语义描述)DOM-like 表示,让 GPT-4V 这类通用 VLM 在没有 HTML/view-hierarchy 输入的情况下也能可靠 ground action 到 UI 元素
- 方法: 三件套——finetuned YOLOv8 interactable region detector(在 67k 自爬的 webpage DOM bbox 上训练)+ finetuned BLIP-2 icon caption 模型(7k GPT-4o 生成的 icon-description pair)+ OCR;输出 SoM 标注图 + 文本语义列表
- 结果: ScreenSpot 平均 73.0%(vs GPT-4V 16.2%);Mind2Web 不用 HTML 也超过用 HTML 的 GPT-4V baseline;AITW 比最强 GPT-4V+history baseline 高 4.7 pts
- Sources: paper | website | github
- Rating: 3 - Foundation(24.7k github stars + V2/OmniTool 持续迭代,事实上已成为 computer-use / GUI agent 的 perception 前置基础设施,社区采纳度远超普通 frontier 工作)
Key Takeaways:
- Pure-vision parsing 是 cross-platform GUI agent 的瓶颈:之前 Set-of-Marks 方法都依赖 DOM/view-hierarchy 拿到 bbox ground truth,限制在 web;OmniParser 的核心论点是只要能可靠地从像素拿到 interactable region + 语义,GPT-4V 的 grounding 能力被严重低估
- 解耦 perception 与 action prediction:把”识别 icon 是什么”从 GPT-4V 主调用里拆出来,作为前置文本注入 prompt,显著降低 VLM 的 composite-task 负担(SeeAssign hard split: 0.620 → 0.900)
- DOM 自动标注是 scalable 的数据源:从 100k popular URL 用 DOM tree 自动抽 bbox,得到 67k 训练样本,无需人工标注;YOLOv8 detector 还能 zero-shot 泛化到 mobile screen(AITW 上 work)
- Web-trained detector 泛化到 mobile:interactable region detection 在 webpages 上训,但在 AITW (Android) 上替换原本专门为 Android 训的 IconNet 反而带来增益,说明 interactability 概念跨 platform 具有一定通用性
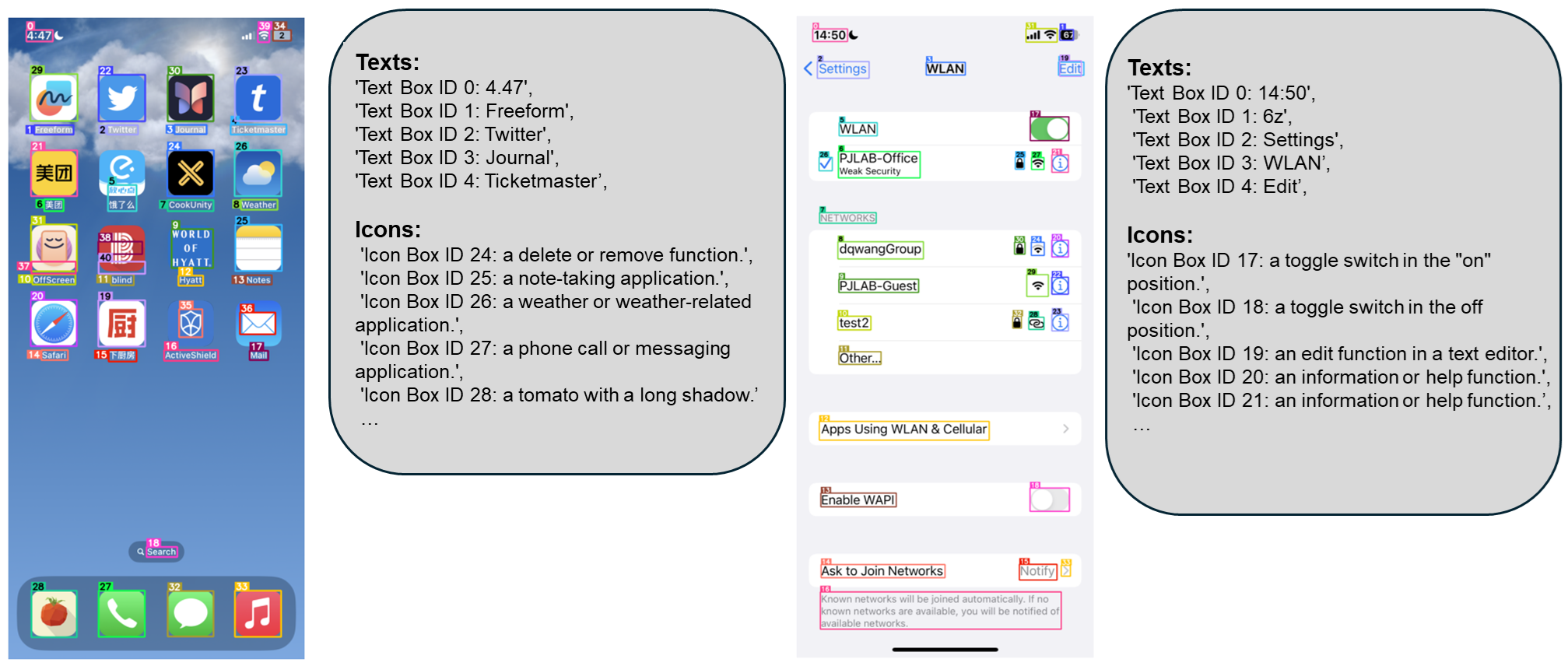
Teaser. OmniParser 的输入输出 pipeline:用户任务 + UI screenshot 输入,输出 SoM 标注的 screenshot + 局部语义文本(OCR text + icon description)。
1. Problem & Motivation
GUI agent 的核心瓶颈不在”理解任务”而在 action grounding——把 LLM 预测的高层动作变成屏幕上的精确 click 坐标。已有路线:
- 直接预测 xy 坐标:GPT-4V 在这上面表现极差,SoM 论文已经指出
- Set-of-Marks (SoM) prompting:在原图上叠 numbered bbox,GPT-4V 只需输出 ID。但已有 SoM 用法都依赖 HTML DOM 或 Android view hierarchy 拿 ground-truth bbox,所以局限在 web 浏览器或 Android。
OmniParser 的论点:pure-vision 也能拿到可靠的 SoM bbox,关键是要有针对性 finetune 过的 detector 和能输出 functional semantics 的 caption 模型。一旦补上这两块,GPT-4V 在 cross-platform GUI 上的能力被严重低估。
❓ 这里其实绕过了一个更根本的问题:为什么不直接训一个 end-to-end VLA 风格的 GUI 模型?作者的 implicit answer 是 GPT-4V 已经够强,瓶颈在 perception 这层;但同时期 SeeClick / CogAgent 走的就是端到端路线。这是 perception-action 分离 vs end-to-end 的典型 framing 差异。
2. Method
OmniParser = interactable region detector + icon caption + OCR,三路并联,输出 (SoM 图, 局部语义文本) 给下游 VLM。
2.1 Interactable Region Detection
Data Curation
- 从 ClueWeb22 取 100k popular URL,渲染网页,从 DOM tree 自动抽 interactable element 的 bbox
- 最终得到 67k unique screenshot + bbox 标注(95/5 train/val 划分: 63641/3349)
- 没有人工标注,scalable
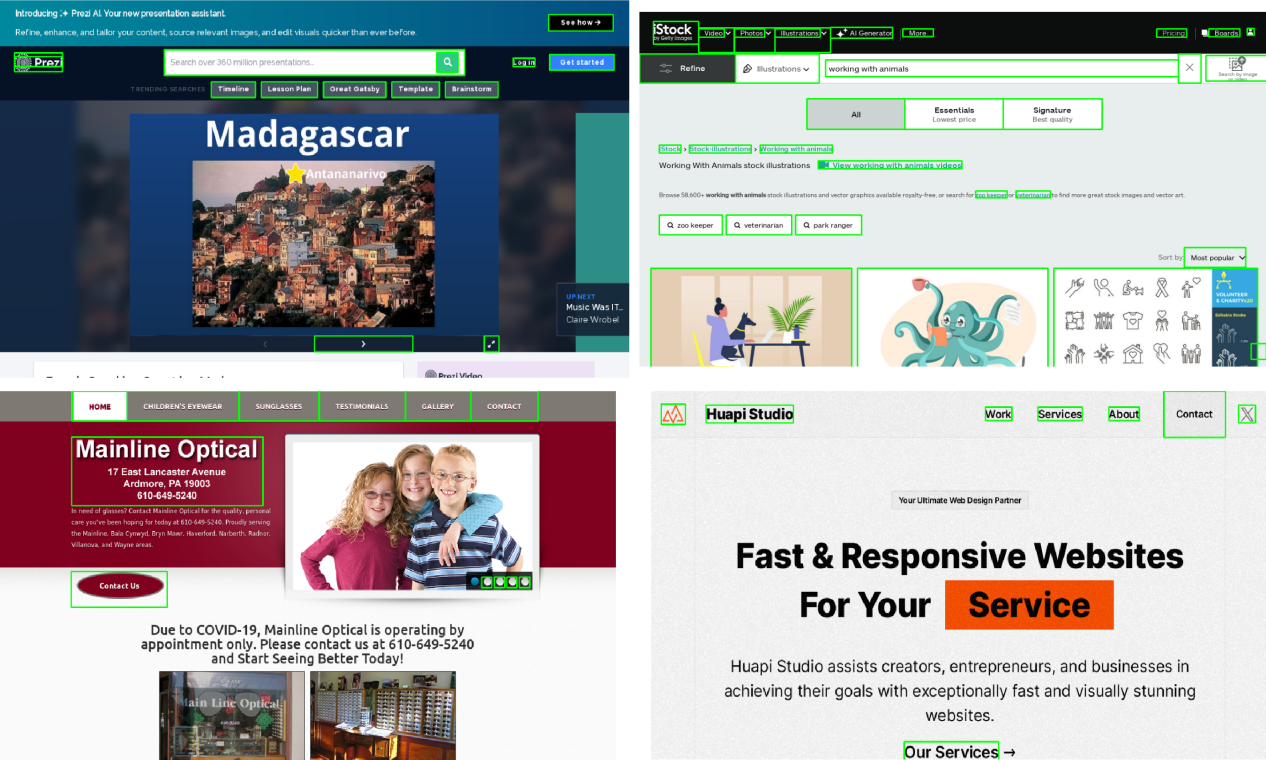
Figure 2. Interactable Region Detection 数据集示例——bbox 来自 webpage DOM tree。
Detector
- YOLOv8,20 epochs, batch 256, lr 1e-3, Adam, 4 GPU
- 训练完后与 OCR module 输出的文本 bbox 合并;overlap > 90% 的去重
- 每个 bbox 标 unique ID,labeling 算法尽量减小数字与其他 bbox 的重叠
❓ 为什么用 YOLOv8 而不是 Grounding DINO?论文 Table 2 ablation 显示 finetuned YOLOv8 (ID) 比 raw Grounding DINO (GD) 在 ScreenSpot 上高 4.3 pts。但没有对比 finetuned Grounding DINO——所以无法判断是 YOLOv8 架构本身 better 还是单纯是 finetune 数据的功劳。
2.2 Local Semantics: Icon Caption
观察:仅给 SoM 标注图,GPT-4V 经常在 “认 icon 是什么” + “选哪个 ID” 这两个 composite task 上失败。前置注入语义文本能解耦这两步。
Caption 模型
- BLIP-2 finetune
- 数据集:7185 个 icon-description pair,GPT-4o 在 ScreenSpot 截图的 detected bbox 上自动生成——若 GPT-4o 判定是 icon,输出一句话 functionality 描述;不是 icon 也保留并标 “this is not an icon”
- 训练:1 epoch, lr 1e-5 constant, no weight decay, Adam
Figure 4. BLIP-2 vs finetuned 对比——原模型描述 icon 的形状颜色,finetune 后能描述功能语义。
![]()
2.3 Pipeline 整体
最终 prompt 给 GPT-4V 的输入:
- 图像:原 screenshot 叠 SoM bbox + ID
- 文本:每个 bbox 的 (text 内容 / icon description) 列表 + 用户任务
3. Experiments
3.1 SeeAssign(自构造的 grounding 单步评测)
作者手工造了 112 个任务(Mobile/Desktop/Web 各取自 ScreenSpot),每个任务对应一个明确的 bbox(如 “click on settings”),按 bbox 数量分 easy (<10) / medium (10-40) / hard (>40)。
Table 1. Local semantics 对 GPT-4V grounding 准确率的提升
| Setting | Easy | Medium | Hard | Overall |
|---|---|---|---|---|
| GPT-4V w.o. local semantics | 0.913 | 0.692 | 0.620 | 0.705 |
| GPT-4V w. local semantics | 1.000 | 0.949 | 0.900 | 0.938 |
bbox 越多,semantic 文本前置的增益越大——印证 “composite task 拆分” 的假设。
3.2 ScreenSpot
跨 Mobile/Desktop/Web 三平台,600+ screenshot。
Table 2. ScreenSpot 全面对比
| Methods | Size | Mobile-T | Mobile-I | Desk-T | Desk-I | Web-T | Web-I | Avg |
|---|---|---|---|---|---|---|---|---|
| Fuyu | 8B | 41.0 | 1.3 | 33.0 | 3.6 | 33.9 | 4.4 | 19.5 |
| CogAgent | 18B | 67.0 | 24.0 | 74.2 | 20.0 | 70.4 | 28.6 | 47.4 |
| SeeClick | 9.6B | 78.0 | 52.0 | 72.2 | 30.0 | 55.7 | 32.5 | 53.4 |
| GPT-4V | - | 22.6 | 24.5 | 20.2 | 11.8 | 9.2 | 8.8 | 16.2 |
| OmniParser (w.o. LS, w. GD) | - | 92.7 | 49.4 | 64.9 | 26.3 | 77.3 | 39.7 | 58.4 |
| OmniParser (w. LS + GD) | - | 94.8 | 53.7 | 89.3 | 44.9 | 83.0 | 45.1 | 68.7 |
| OmniParser (w. LS + ID) | - | 93.9 | 57.0 | 91.3 | 63.6 | 81.3 | 51.0 | 73.0 |
GPT-4V 16.2 → 73.0,碾压同期 finetuned GUI 专用模型 (SeeClick 53.4, CogAgent 47.4)。LS 和 finetuned ID 各自有显著贡献(ablation: w/o LS 掉 10 pts,GD→ID 涨 4.3 pts)。
3.3 Mind2Web
Web navigation,3 个 split: Cross-Website / Cross-Domain / Cross-Task。
Table 3. Mind2Web Step Success Rate(摘 SR 指标)
| Methods | HTML-free | image | CW-SR | CD-SR | CT-SR |
|---|---|---|---|---|---|
| SeeClick | ✓ | ✓ | 16.4 | 20.8 | 25.5 |
| MindAct (GPT-4 + HTML) | × | × | 38.9 | 39.6 | 39.6 |
| GPT-4V+SOM (HTML bbox) | × | ✓ | 32.7 | 23.7 | 20.3 |
| GPT-4V+textual choice | × | ✓ | 32.4 | 36.8 | 40.2 |
| OmniParser (w. LS + GD) | ✓ | ✓ | 36.1 | 36.8 | 38.7 |
| OmniParser (w. LS + ID) | ✓ | ✓ | 36.5 | 42.0 | 39.4 |
关键观察:OmniParser 不用 HTML 也能比用 HTML 的 GPT-4 / GPT-4V baselines 强(CW +4.1, CD +5.2 over GPT-4V+textual)。Cross-Task 上略输 0.8 pts。
3.4 AITW(Android in the Wild)
30k instruction, 715k trajectory 的 Android navigation benchmark。
Table 4. AITW Overall
| Methods | General | Install | GoogleApps | Single | WebShop | Overall |
|---|---|---|---|---|---|---|
| GPT-4V image-only | 41.7 | 42.6 | 49.8 | 72.8 | 45.7 | 50.5 |
| GPT-4V + history (IconNet) | 43.0 | 46.1 | 49.2 | 78.3 | 48.2 | 53.0 |
| OmniParser (w. LS + ID) | 48.3 | 57.8 | 51.6 | 77.4 | 52.9 | 57.7 |
最重要的发现:ID detector 在 webpage 上训,直接替换专为 Android 训的 IconNet 还能涨 4.7 pts——interactability 概念跨平台泛化。
❓ 但这里没控制 caption 模型的影响,因为 IconNet baseline 没有 LS。所以 +4.7 里有多少来自 detector swap、多少来自 LS,分不清。
3.5 Plugin to other VLMs(来自 website)
OmniParser 也作为 plugin 接到 Phi-3.5-V 和 Llama-3.2-V,相同的 finetuned ID + LS 模式带来一致提升。说明前置 perception 这个 framework 对底座 VLM 不绑定。
4. Failure Modes(作者诚实讨论的部分)
- Repeated icons/texts:7 个一样的 alarm 按钮,GPT-4V 选不准——SoM ID 不足以区分语义重复元素
- Coarse OCR bbox:OCR 把整段文字框住,但 click point 用 box center,落在 hyperlink 之外 → 失败。作者建议把 OCR 和 interactable detection 合并到一个模型
- Icon misinterpretation:三个点 icon 既可能是 “more” 也可能是 “loading”——caption 模型只看裁剪的小图,缺 global context
关联工作
基于
- Set-of-Marks Prompting [Yang et al. 2023]: OmniParser 的 visual prompting 范式直接来自 SoM,关键扩展是把 bbox 来源从 HTML/view-hierarchy 换成 finetuned 视觉 detector
- BLIP-2 [Li et al. 2023]: icon caption 模型 backbone
- YOLOv8: interactable detector 架构
- ClueWeb22 [Overwijk et al. 2022]: 数据爬取的 seed URL 来源
对比
- SeeClick [Cheng et al. 2024]: end-to-end finetuned GUI VLM,OmniParser 在 ScreenSpot 上以 modular pipeline + GPT-4V 大幅超越(73.0 vs 53.4)
- CogAgent [Hong et al. 2023]: 18B GUI 专用 VLM,同样被 OmniParser 超越
- SeeAct [Zheng et al. 2024]: 同样用 GPT-4V,但依赖 HTML 抽 element,OmniParser 在不用 HTML 的情况下平了或超过
- MindAct [Deng et al. 2023]: Mind2Web 原始 baseline,用 HTML,OmniParser 在 Cross-Domain/Website 上反超
方法相关
- Ferret-UI, CogAgent, Fuyu: 同期端到端 mobile/GUI VLM,代表另一条路线(不分离 perception 和 action)
- IconNet [Sunkara et al. 2022]: AITW 默认 detector,OmniParser 的 ID 直接替换它并涨点
- Mobile-Agent / Mobile-Agent-v2: 类似 modular agent framework,在 mobile domain
- OSWorld: cross-platform OS-level benchmark,OmniParser 没在上面评测,是一个明显的 next step
论文点评
Strengths
- Framing 简洁,问题定义清楚:把 GUI agent 的瓶颈从”VLM 不够强”重新 frame 成”perception 层不够强”,并且用一组干净的 ablation(w/o LS, w/o ID)证明了这个 framing。
- Cross-platform 泛化的实证发现 valuable:webpage-trained ID detector 能直接用在 Android 上 (+4.7 pts over IconNet),这是个 non-trivial 的正向 transfer 信号。
- Pipeline 简单且 scalable:YOLOv8 + BLIP-2 + OCR,没有任何花哨架构;数据全部 DOM 自动抽 + GPT-4o 自动标注,完全可以 scale。
- 诚实讨论 failure mode:明确指出 repeated elements、coarse OCR、icon misinterpretation 三种典型失败,没有粉饰。
Weaknesses
- Ablation 不完整:(a) 没对比 finetuned Grounding DINO,无法 isolate “YOLOv8 architecture” vs “finetune data” 的功劳;(b) AITW 上 IconNet baseline 没有 LS,所以 +4.7 pts 的归因混淆了 detector swap 和 LS 增益。
- Caption 模型的 noisy supervision 没量化:7k 训练集是 GPT-4o 生成的,不是 human label。作者没分析 GPT-4o 自己的 icon naming 准确率上限,所以 caption 质量本身有 invisible ceiling。
- End-to-end vs modular 的 trade-off 未讨论:模块化 perception + frozen GPT-4V 在 latency/cost 上比端到端 GUI VLA 显然劣(每步至少 3 次模型调用 + 1 次大模型推理),但论文没提这点。
- Coordinate prediction 用 bbox center 是 hardcoded heuristic,AITW failure case 1 已经暴露这个问题,但没尝试修正。
- Benchmark 都是 single-step 或 short-horizon evaluation:ScreenSpot 是单步 grounding,Mind2Web 用的是 step-wise success rate(不是 trajectory-level);OSWorld 这种长序列任务上的表现没测。
可信评估
Artifact 可获取性
- 代码: inference 完整开源(github.com/microsoft/OmniParser,含 demo);training 代码未在 main paper 提及
- 模型权重: 已发布 finetuned YOLOv8 detector + BLIP-2 caption checkpoints(HuggingFace),后续 V2 checkpoints 在 2025/02 发布
- 训练细节: 较完整——detector (20 epochs, bs 256, lr 1e-3, Adam, 4 GPU), caption (1 epoch, lr 1e-5, Adam);数据规模 67k + 7k 都说明
- 数据集: 67k interactable detection 数据集和 7k icon-caption 数据集是否公开 release,未明确说明(仅说明数据收集来自 ClueWeb22 + GPT-4o)
Claim 可验证性
- ✅ ScreenSpot / Mind2Web / AITW 数值改进:标准 benchmark + 公开 inference code,可独立复现
- ✅ ID detector 跨平台泛化(web → mobile):AITW 的 +4.7 是直接 swap,可验证
- ⚠️ “GPT-4V 的 GUI 能力被严重低估”:定性 claim,依赖于 OmniParser 本身的 ceiling;如果 perception 模块还有缺陷(如失败案例),那 GPT-4V 的真实 ceiling 还是低估的
- ⚠️ “interactability 概念跨平台通用”:仅基于 web → Android 一个方向的实验,没在 iOS / desktop OS-level 任务上系统验证
- ⚠️ Caption 模型的 functionality 描述准确率:用 GPT-4o 自标,没有 human-annotated holdout 评测,质量上限不明
Notes
- 核心洞察: “把 perception bottleneck 解耦出来”是个简单但有效的 framing。后续 OmniParser V2 (2025/02) + OmniTool (Windows VM control) 验证了这条路线的工程可扩展性。
- 对我个人的启发: 在 GUI/computer-use agent 这条线,模块化 perception + 通用大脑 与 end-to-end VLA 是两条平行路线。OmniParser 的成功说明前者短期内可能更 practical(不用大规模 GUI 数据从头训),但长期可能被 end-to-end 替代——类似 vision pipeline 的 hand-crafted feature → CNN 的转变。
- 可借鉴方法: 用 DOM 自动抽 bbox + GPT-4o 自动生成 functionality description,这种”用现成大模型 bootstrap 标注”的 pattern 在 VLA / robotics affordance label 上也适用
- 疑问/后续可看:
- 这篇 single-step grounding 占大头的评测在 long-horizon 场景下是否还成立?OSWorld / Visual-WebArena trajectory-level success 才是最终的考验
- V2 解决了 V1 的哪些 failure mode?特别是 repeated element 和 coarse OCR 这两块
- 与 SeeClick / Aria-UI / UGround 这些后来更强的 end-to-end GUI grounding 模型的 head-to-head 比较
Rating
Metrics (as of 2026-04-24): citation=163, influential=23 (14.1%), velocity=7.87/mo; HF upvotes=24; github 24682⭐ / forks=2164 / 90d commits=0 / pushed 10d ago
分数:3 - Foundation 理由:OmniParser 是 pure-vision GUI parsing 的代表工作,被后续 computer-use agent(UFO、OmniTool、多篇 2025 agent 论文)广泛作为 perception 前置 baseline,Strengths 3 所述的 framing + 可 scale pipeline 已被复用为标准组件。2026-04 复核:github 24,682⭐ / 2164 forks(过去 10 天仍在活跃维护)、V2 发布后社区采纳度持续扩大、influential citation 23/163 (14.1%) 显示方法被实质继承——这个量级的 community adoption 已明显超过 Frontier 的 “被采用尚未定型”,落到 Foundation 的 “方向的 de facto 基础设施”。相较 Frontier,stars 量级(24k vs 同期 frontier 工作通常几百~几千)+ V2 持续迭代证明它没有被 end-to-end grounding VLM 取代,而是与之共存为 perception 前置层;相较 Archived 更不成立。Weakness 里的 single-step evaluation / modular trade-off 是方法局限但不影响其基础设施地位。